 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Embedded Monocular Vision Approach for Ground-Aware Objects Detection and Position Estimation
Jul 20, 2022



In the RoboCup Small Size League (SSL), teams are encouraged to propose solutions for executing basic soccer tasks inside the SSL field using only embedded sensing information. Thus, this work proposes an embedded monocular vision approach for detecting objects and estimating relative positions inside the soccer field. Prior knowledge from the environment is exploited by assuming objects lay on the ground, and the onboard camera has its position fixed on the robot. We implemented the proposed method on an NVIDIA Jetson Nano and employed SSD MobileNet v2 for 2D Object Detection with TensorRT optimization, detecting balls, robots, and goals with distances up to 3.5 meters. Ball localization evaluation shows that the proposed solution overcomes the currently used SSL vision system for positions closer than 1 meter to the onboard camera with a Root Mean Square Error of 14.37 millimeters. In addition, the proposed method achieves real-time performance with an average processing speed of 30 frames per second.
Optimized Wireless Control and Telemetry Network for Mobile Soccer Robots
Jun 28, 2021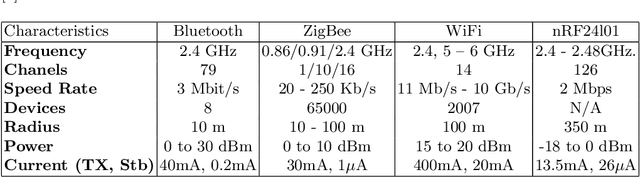
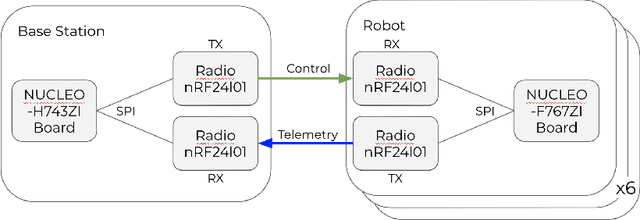
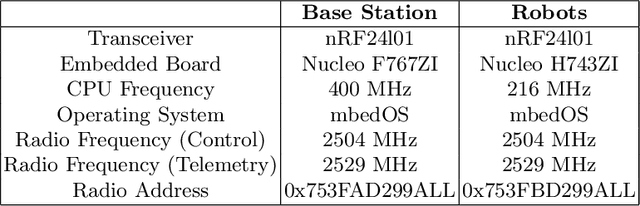
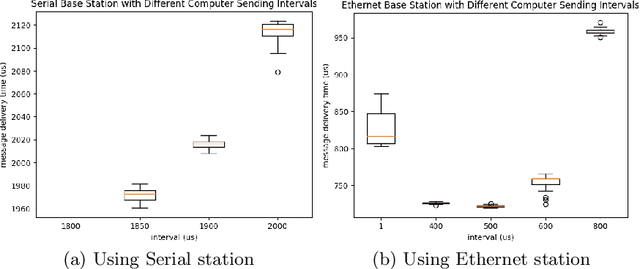
In a diverse set of robotics applications, including RoboCup categories, mobile robots require control commands to interact with surrounding environment correctly. These control commands should come wirelessly to not interfere in robots' movement; also, the communication has a set of requirements, including low latency and consistent delivery. This paper presents a complete communication architecture consisting of computer communication with a base station, which transmits the data to robots and returns robots telemetry to the computer. With the proposed communication, it is possible to send messages in less than 4.5ms for six robots with telemetry enables in all of them.
Dataset and Benchmarking of Real-Time Embedded Object Detection for RoboCup SSL
Jun 28, 2021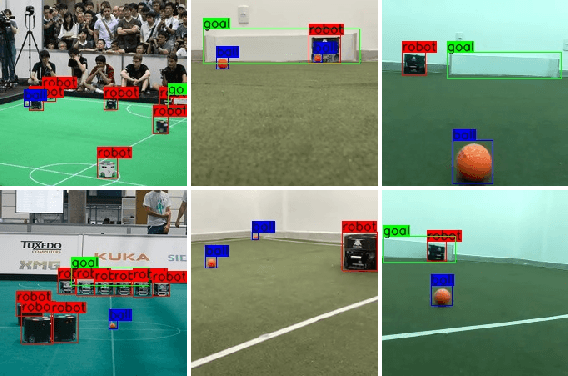

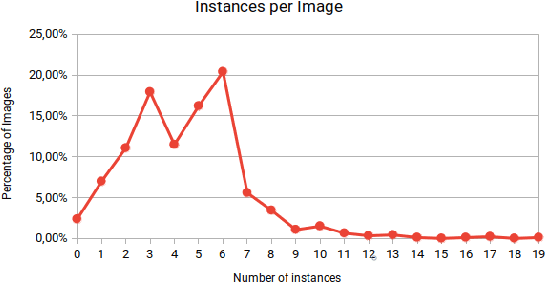

When producing a model to object detection in a specific context, the first obstacle is to have a dataset labeling the desired classes. In RoboCup, some leagues already have more than one dataset to train and evaluate a model. However, in the Small Size League (SSL), there is not such dataset available yet. This paper presents an open-source dataset to be used as a benchmark for real-time object detection in SSL. This work also presented a pipeline to train, deploy, and evaluate Convolutional Neural Networks (CNNs) models in a low-power embedded system. This pipeline was used to evaluate the proposed dataset with state-of-art optimized models. In this dataset, the MobileNet SSD v1 achieves 44.88% AP (68.81% AP50) at 94 Frames Per Second (FPS) while running on an SSL robot.