Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Wireless Control and Telemetry Network for Mobile Soccer Robots
Jun 28, 2021
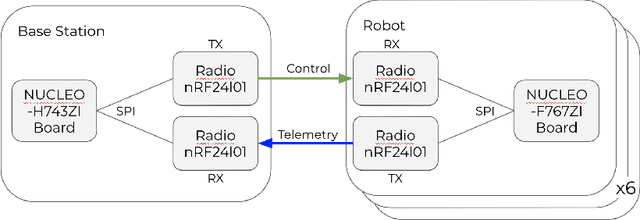
In a diverse set of robotics applications, including RoboCup categories, mobile robots require control commands to interact with surrounding environment correctly. These control commands should come wirelessly to not interfere in robots' movement; also, the communication has a set of requirements, including low latency and consistent delivery. This paper presents a complete communication architecture consisting of computer communication with a base station, which transmits the data to robots and returns robots telemetry to the computer. With the proposed communication, it is possible to send messages in less than 4.5ms for six robots with telemetry enables in all of them.
* 12 pages, published in RoboCup Symposium 2021
Via