 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiview Hessian regularized logistic regression for action recognition
Mar 03, 2014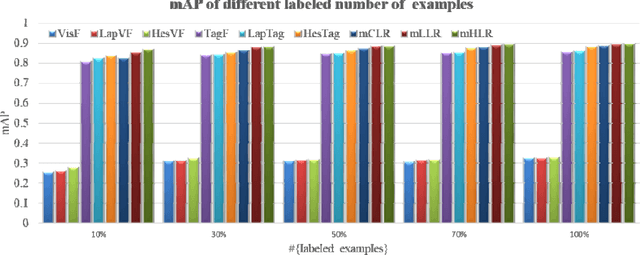
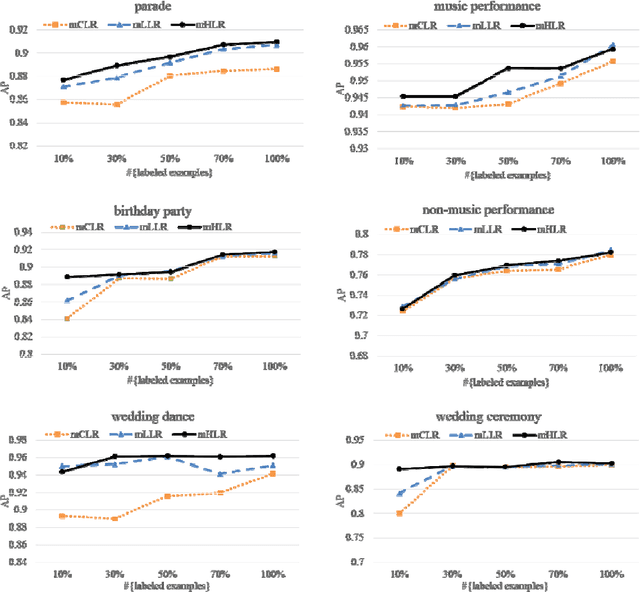
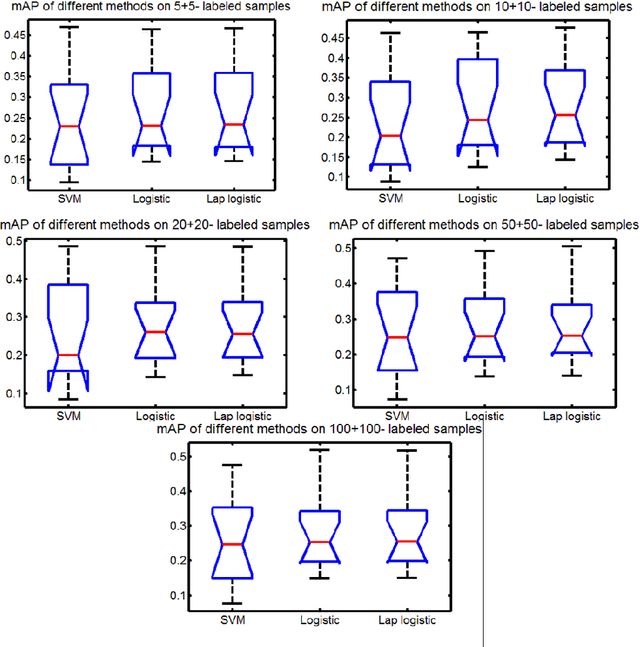
With the rapid development of social media sharing, people often need to manage the growing volume of multimedia data such as large scale video classification and annotation, especially to organize those videos containing human activities. Recently, manifold regularized semi-supervised learning (SSL), which explores the intrinsic data probability distribution and then improves the generalization ability with only a small number of labeled data, has emerged as a promising paradigm for semiautomatic video classification. In addition, human action videos often have multi-modal content and different representations. To tackle the above problems, in this paper we propose multiview Hessian regularized logistic regression (mHLR) for human action recognition. Compared with existing work, the advantages of mHLR lie in three folds: (1) mHLR combines multiple Hessian regularization, each of which obtained from a particular representation of instance, to leverage the exploring of local geometry; (2) mHLR naturally handle multi-view instances with multiple representations; (3) mHLR employs a smooth loss function and then can be effectively optimized. We carefully conduct extensive experiments on the unstructured social activity attribute (USAA) dataset and the experimental results demonstrate the effectiveness of the proposed multiview Hessian regularized logistic regression for human action recognition.
Large-Scale Paralleled Sparse Principal Component Analysis
Dec 21, 2013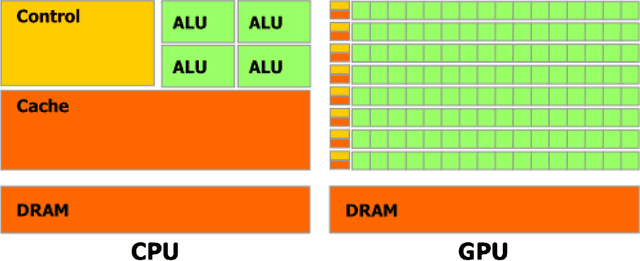
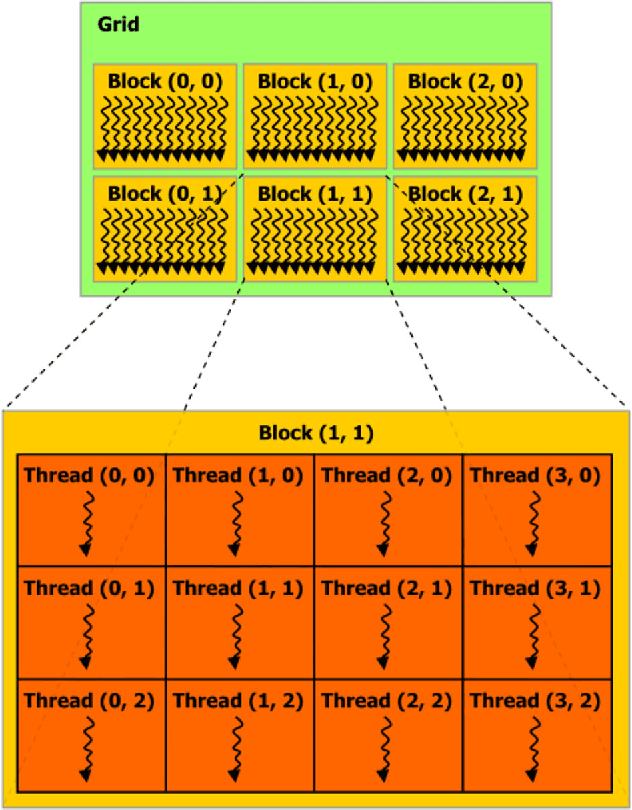
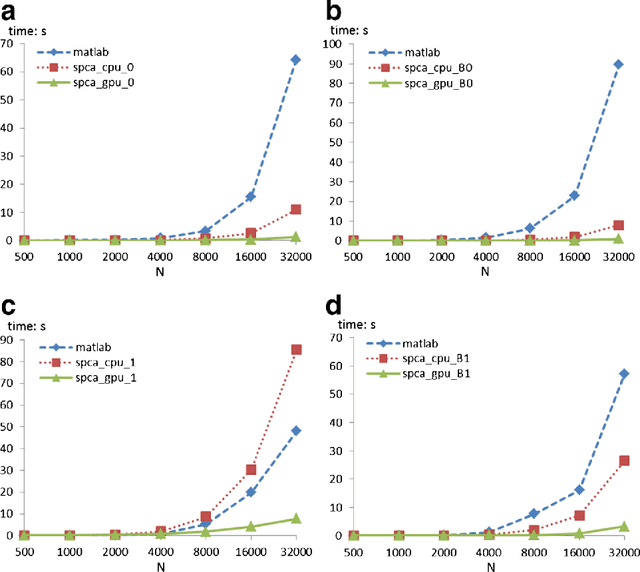
Principal component analysis (PCA) is a statistical technique commonly used in multivariate data analysis. However, PCA can be difficult to interpret and explain since the principal components (PCs) are linear combinations of the original variables. Sparse PCA (SPCA) aims to balance statistical fidelity and interpretability by approximating sparse PCs whose projections capture the maximal variance of original data. In this paper we present an efficient and paralleled method of SPCA using graphics processing units (GPUs), which can process large blocks of data in parallel. Specifically, we construct parallel implementations of the four optimization formulations of the generalized power method of SPCA (GP-SPCA), one of the most efficient and effective SPCA approaches, on a GPU. The parallel GPU implementation of GP-SPCA (using CUBLAS) is up to eleven times faster than the corresponding CPU implementation (using CBLAS), and up to 107 times faster than a MatLab implementation. Extensive comparative experiments in several real-world datasets confirm that SPCA offers a practical advantage.
Manifold regularized kernel logistic regression for web image annotation
Dec 21, 2013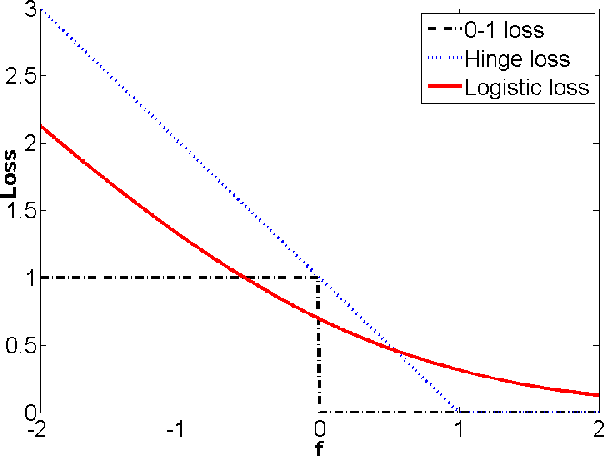

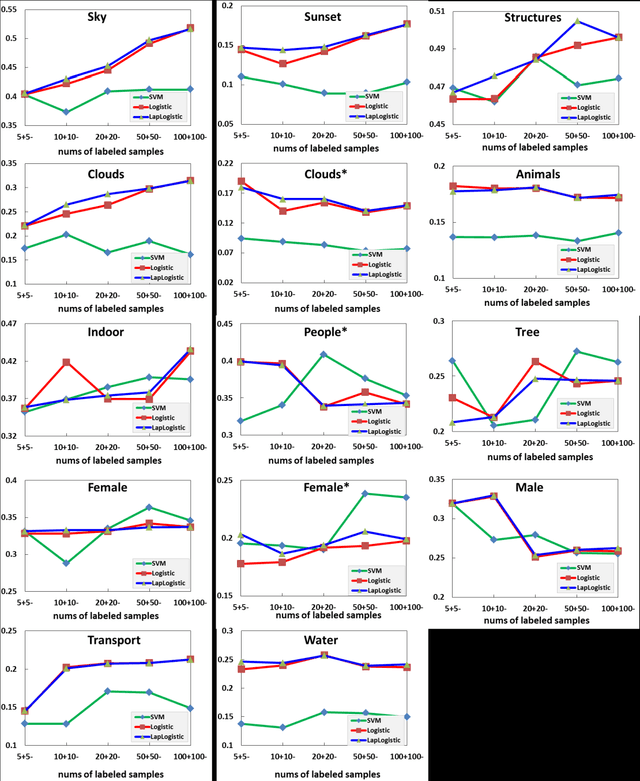
With the rapid advance of Internet technology and smart devices, users often need to manage large amounts of multimedia information using smart devices, such as personal image and video accessing and browsing. These requirements heavily rely on the success of image (video) annotation, and thus large scale image annotation through innovative machine learning methods has attracted intensive attention in recent years. One representative work is support vector machine (SVM). Although it works well in binary classification, SVM has a non-smooth loss function and can not naturally cover multi-class case. In this paper, we propose manifold regularized kernel logistic regression (KLR) for web image annotation. Compared to SVM, KLR has the following advantages: (1) the KLR has a smooth loss function; (2) the KLR produces an explicit estimate of the probability instead of class label; and (3) the KLR can naturally be generalized to the multi-class case. We carefully conduct experiments on MIR FLICKR dataset and demonstrate the effectiveness of manifold regularized kernel logistic regression for image annotation.
A Model Approximation Scheme for Planning in Partially Observable Stochastic Domains
Nov 01, 1997

Partially observable Markov decision processes (POMDPs) are a natural model for planning problems where effects of actions are nondeterministic and the state of the world is not completely observable. It is difficult to solve POMDPs exactly. This paper proposes a new approximation scheme. The basic idea is to transform a POMDP into another one where additional information is provided by an oracle. The oracle informs the planning agent that the current state of the world is in a certain region. The transformed POMDP is consequently said to be region observable. It is easier to solve than the original POMDP. We propose to solve the transformed POMDP and use its optimal policy to construct an approximate policy for the original POMDP. By controlling the amount of additional information that the oracle provides, it is possible to find a proper tradeoff between computational time and approximation quality. In terms of algorithmic contributions, we study in details how to exploit region observability in solving the transformed POMDP. To facilitate the study, we also propose a new exact algorithm for general POMDPs. The algorithm is conceptually simple and yet is significantly more efficient than all previous exact algorithms.
* See http://www.jair.org/ for any accompanying files