 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Decision-driven Methodology for Designing Uncertainty-aware AI Self-Assessment
Aug 02, 2024Artificial intelligence (AI) has revolutionized decision-making processes and systems throughout society and, in particular, has emerged as a significant technology in high-impact scenarios of national interest. Yet, despite AI's impressive predictive capabilities in controlled settings, it still suffers from a range of practical setbacks preventing its widespread use in various critical scenarios. In particular, it is generally unclear if a given AI system's predictions can be trusted by decision-makers in downstream applications. To address the need for more transparent, robust, and trustworthy AI systems, a suite of tools has been developed to quantify the uncertainty of AI predictions and, more generally, enable AI to "self-assess" the reliability of its predictions. In this manuscript, we categorize methods for AI self-assessment along several key dimensions and provide guidelines for selecting and designing the appropriate method for a practitioner's needs. In particular, we focus on uncertainty estimation techniques that consider the impact of self-assessment on the choices made by downstream decision-makers and on the resulting costs and benefits of decision outcomes. To demonstrate the utility of our methodology for self-assessment design, we illustrate its use for two realistic national-interest scenarios. This manuscript is a practical guide for machine learning engineers and AI system users to select the ideal self-assessment techniques for each problem.
SoK: Vehicle Orientation Representations for Deep Rotation Estimation
Dec 10, 2021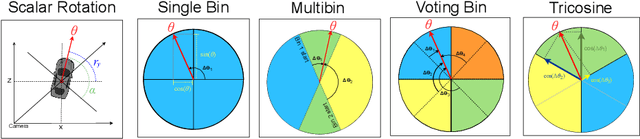

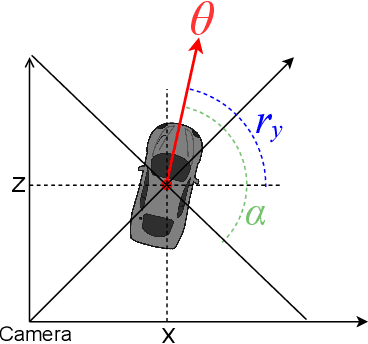

In recent years, there is an influx of deep learning models for 3D vehicle object detection. However, little attention was paid to orientation prediction. Existing research work proposed various vehicle orientation representation methods for deep learning, however a holistic, systematic review has not been conducted. Through our experiments, we categorize and compare the accuracy performance of various existing orientation representations using the KITTI 3D object detection dataset, and propose a new form of orientation representation: Tricosine. Among these, the 2D Cartesian-based representation, or Single Bin, achieves the highest accuracy, with additional channeled inputs (positional encoding and depth map) not boosting prediction performance. Our code is published on GitHub: https://github.com/umd-fire-coml/KITTI-orientation-learning