 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Classifier Evaluation: A Fairer Benchmarking Strategy Based on Ability and Robustness
Apr 13, 2025Benchmarking is a fundamental practice in machine learning (ML) for comparing the performance of classification algorithms. However, traditional evaluation methods often overlook a critical aspect: the joint consideration of dataset complexity and an algorithm's ability to generalize. Without this dual perspective, assessments may favor models that perform well on easy instances while failing to capture their true robustness. To address this limitation, this study introduces a novel evaluation methodology that combines Item Response Theory (IRT) with the Glicko-2 rating system, originally developed to measure player strength in competitive games. IRT assesses classifier ability based on performance over difficult instances, while Glicko-2 updates performance metrics - such as rating, deviation, and volatility - via simulated tournaments between classifiers. This combined approach provides a fairer and more nuanced measure of algorithm capability. A case study using the OpenML-CC18 benchmark showed that only 15% of the datasets are truly challenging and that a reduced subset with 50% of the original datasets offers comparable evaluation power. Among the algorithms tested, Random Forest achieved the highest ability score. The results highlight the importance of improving benchmark design by focusing on dataset quality and adopting evaluation strategies that reflect both difficulty and classifier proficiency.
How Reliable and Stable are Explanations of XAI Methods?
Jul 03, 2024Black box models are increasingly being used in the daily lives of human beings living in society. Along with this increase, there has been the emergence of Explainable Artificial Intelligence (XAI) methods aimed at generating additional explanations regarding how the model makes certain predictions. In this sense, methods such as Dalex, Eli5, eXirt, Lofo and Shap emerged as different proposals and methodologies for generating explanations of black box models in an agnostic way. Along with the emergence of these methods, questions arise such as "How Reliable and Stable are XAI Methods?". With the aim of shedding light on this main question, this research creates a pipeline that performs experiments using the diabetes dataset and four different machine learning models (LGBM, MLP, DT and KNN), creating different levels of perturbations of the test data and finally generates explanations from the eXirt method regarding the confidence of the models and also feature relevances ranks from all XAI methods mentioned, in order to measure their stability in the face of perturbations. As a result, it was found that eXirt was able to identify the most reliable models among all those used. It was also found that current XAI methods are sensitive to perturbations, with the exception of one specific method.
PRIBOOT: A New Data-Driven Expert for Improved Driving Simulations
Jun 12, 2024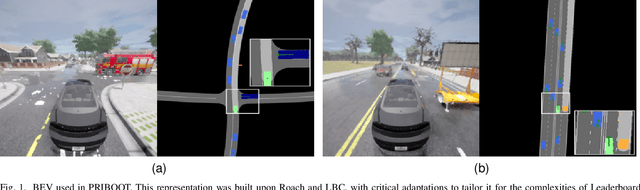
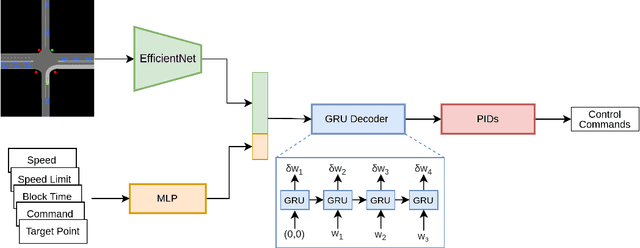
The development of Autonomous Driving (AD) systems in simulated environments like CARLA is crucial for advancing real-world automotive technologies. To drive innovation, CARLA introduced Leaderboard 2.0, significantly more challenging than its predecessor. However, current AD methods have struggled to achieve satisfactory outcomes due to a lack of sufficient ground truth data. Human driving logs provided by CARLA are insufficient, and previously successful expert agents like Autopilot and Roach, used for collecting datasets, have seen reduced effectiveness under these more demanding conditions. To overcome these data limitations, we introduce PRIBOOT, an expert agent that leverages limited human logs with privileged information. We have developed a novel BEV representation specifically tailored to meet the demands of this new benchmark and processed it as an RGB image to facilitate the application of transfer learning techniques, instead of using a set of masks. Additionally, we propose the Infraction Rate Score (IRS), a new evaluation metric designed to provide a more balanced assessment of driving performance over extended routes. PRIBOOT is the first model to achieve a Route Completion (RC) of 75% in Leaderboard 2.0, along with a Driving Score (DS) and IRS of 20% and 45%, respectively. With PRIBOOT, researchers can now generate extensive datasets, potentially solving the data availability issues that have hindered progress in this benchmark.
RLAD: Reinforcement Learning from Pixels for Autonomous Driving in Urban Environments
May 29, 2023Current approaches of Reinforcement Learning (RL) applied in urban Autonomous Driving (AD) focus on decoupling the perception training from the driving policy training. The main reason is to avoid training a convolution encoder alongside a policy network, which is known to have issues related to sample efficiency, degenerated feature representations, and catastrophic self-overfitting. However, this paradigm can lead to representations of the environment that are not aligned with the downstream task, which may result in suboptimal performances. To address this limitation, this paper proposes RLAD, the first Reinforcement Learning from Pixels (RLfP) method applied in the urban AD domain. We propose several techniques to enhance the performance of an RLfP algorithm in this domain, including: i) an image encoder that leverages both image augmentations and Adaptive Local Signal Mixing (A-LIX) layers; ii) WayConv1D, which is a waypoint encoder that harnesses the 2D geometrical information of the waypoints using 1D convolutions; and iii) an auxiliary loss to increase the significance of the traffic lights in the latent representation of the environment. Experimental results show that RLAD significantly outperforms all state-of-the-art RLfP methods on the NoCrash benchmark. We also present an infraction analysis on the NoCrash-regular benchmark, which indicates that RLAD performs better than all other methods in terms of both collision rate and red light infractions.