 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRIBOOT: A New Data-Driven Expert for Improved Driving Simulations
Paper and Code
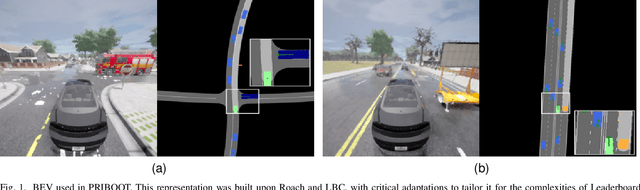
The development of Autonomous Driving (AD) systems in simulated environments like CARLA is crucial for advancing real-world automotive technologies. To drive innovation, CARLA introduced Leaderboard 2.0, significantly more challenging than its predecessor. However, current AD methods have struggled to achieve satisfactory outcomes due to a lack of sufficient ground truth data. Human driving logs provided by CARLA are insufficient, and previously successful expert agents like Autopilot and Roach, used for collecting datasets, have seen reduced effectiveness under these more demanding conditions. To overcome these data limitations, we introduce PRIBOOT, an expert agent that leverages limited human logs with privileged information. We have developed a novel BEV representation specifically tailored to meet the demands of this new benchmark and processed it as an RGB image to facilitate the application of transfer learning techniques, instead of using a set of masks. Additionally, we propose the Infraction Rate Score (IRS), a new evaluation metric designed to provide a more balanced assessment of driving performance over extended routes. PRIBOOT is the first model to achieve a Route Completion (RC) of 75% in Leaderboard 2.0, along with a Driving Score (DS) and IRS of 20% and 45%, respectively. With PRIBOOT, researchers can now generate extensive datasets, potentially solving the data availability issues that have hindered progress in this benchmark.