 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomalyVFM -- Transforming Vision Foundation Models into Zero-Shot Anomaly Detectors
Jan 28, 2026Zero-shot anomaly detection aims to detect and localise abnormal regions in the image without access to any in-domain training images. While recent approaches leverage vision-language models (VLMs), such as CLIP, to transfer high-level concept knowledge, methods based on purely vision foundation models (VFMs), like DINOv2, have lagged behind in performance. We argue that this gap stems from two practical issues: (i) limited diversity in existing auxiliary anomaly detection datasets and (ii) overly shallow VFM adaptation strategies. To address both challenges, we propose AnomalyVFM, a general and effective framework that turns any pretrained VFM into a strong zero-shot anomaly detector. Our approach combines a robust three-stage synthetic dataset generation scheme with a parameter-efficient adaptation mechanism, utilising low-rank feature adapters and a confidence-weighted pixel loss. Together, these components enable modern VFMs to substantially outperform current state-of-the-art methods. More specifically, with RADIO as a backbone, AnomalyVFM achieves an average image-level AUROC of 94.1% across 9 diverse datasets, surpassing previous methods by significant 3.3 percentage points. Project Page: https://maticfuc.github.io/anomaly_vfm/
A Novel Unified Architecture for Low-Shot Counting by Detection and Segmentation
Sep 27, 2024Low-shot object counters estimate the number of objects in an image using few or no annotated exemplars. Objects are localized by matching them to prototypes, which are constructed by unsupervised image-wide object appearance aggregation. Due to potentially diverse object appearances, the existing approaches often lead to overgeneralization and false positive detections. Furthermore, the best-performing methods train object localization by a surrogate loss, that predicts a unit Gaussian at each object center. This loss is sensitive to annotation error, hyperparameters and does not directly optimize the detection task, leading to suboptimal counts. We introduce GeCo, a novel low-shot counter that achieves accurate object detection, segmentation, and count estimation in a unified architecture. GeCo robustly generalizes the prototypes across objects appearances through a novel dense object query formulation. In addition, a novel counting loss is proposed, that directly optimizes the detection task and avoids the issues of the standard surrogate loss. GeCo surpasses the leading few-shot detection-based counters by $\sim$25\% in the total count MAE, achieves superior detection accuracy and sets a new solid state-of-the-art result across all low-shot counting setups.
DAVE -- A Detect-and-Verify Paradigm for Low-Shot Counting
Apr 25, 2024Low-shot counters estimate the number of objects corresponding to a selected category, based on only few or no exemplars annotated in the image. The current state-of-the-art estimates the total counts as the sum over the object location density map, but does not provide individual object locations and sizes, which are crucial for many applications. This is addressed by detection-based counters, which, however fall behind in the total count accuracy. Furthermore, both approaches tend to overestimate the counts in the presence of other object classes due to many false positives. We propose DAVE, a low-shot counter based on a detect-and-verify paradigm, that avoids the aforementioned issues by first generating a high-recall detection set and then verifying the detections to identify and remove the outliers. This jointly increases the recall and precision, leading to accurate counts. DAVE outperforms the top density-based counters by ~20% in the total count MAE, it outperforms the most recent detection-based counter by ~20% in detection quality and sets a new state-of-the-art in zero-shot as well as text-prompt-based counting.
TransFusion -- A Transparency-Based Diffusion Model for Anomaly Detection
Nov 16, 2023


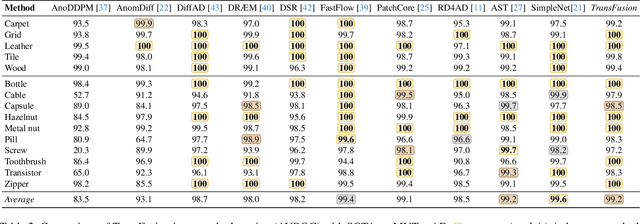
Surface anomaly detection is a vital component in manufacturing inspection. Reconstructive anomaly detection methods restore the normal appearance of an object, ideally modifying only the anomalous regions. Due to the limitations of commonly used reconstruction architectures, the produced reconstructions are often poor and either still contain anomalies or lack details in anomaly-free regions. Recent reconstructive methods adopt diffusion models, however with the standard diffusion process the problems are not adequately addressed. We propose a novel transparency-based diffusion process, where the transparency of anomalous regions is progressively increased, restoring their normal appearance accurately and maintaining the appearance of anomaly-free regions without loss of detail. We propose TRANSparency DifFUSION (TransFusion), a discriminative anomaly detection method that implements the proposed diffusion process, enabling accurate downstream anomaly detection. TransFusion achieves state-of-the-art performance on both the VisA and the MVTec AD datasets, with an image-level AUROC of 98.5% and 99.2%, respectively.
Cheating Depth: Enhancing 3D Surface Anomaly Detection via Depth Simulation
Nov 02, 2023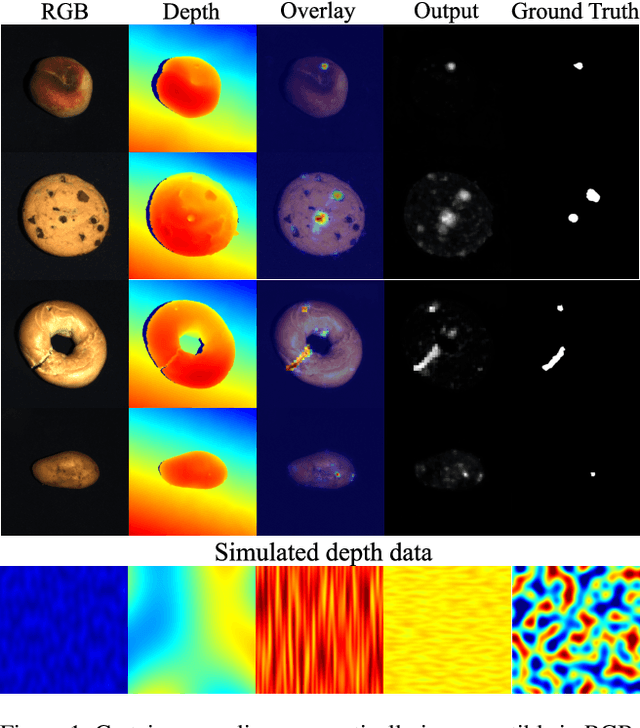
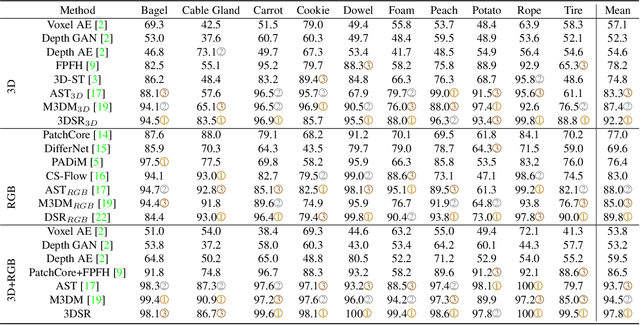
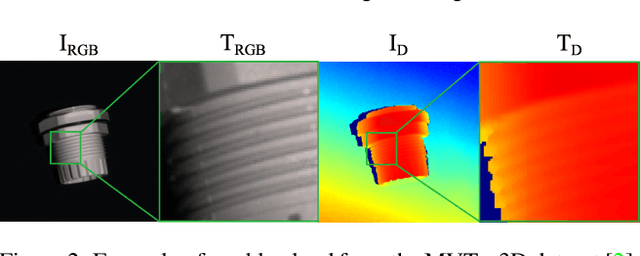
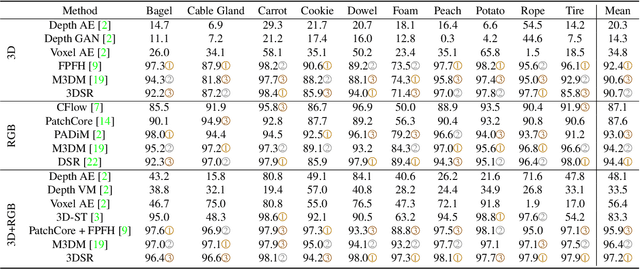
RGB-based surface anomaly detection methods have advanced significantly. However, certain surface anomalies remain practically invisible in RGB alone, necessitating the incorporation of 3D information. Existing approaches that employ point-cloud backbones suffer from suboptimal representations and reduced applicability due to slow processing. Re-training RGB backbones, designed for faster dense input processing, on industrial depth datasets is hindered by the limited availability of sufficiently large datasets. We make several contributions to address these challenges. (i) We propose a novel Depth-Aware Discrete Autoencoder (DADA) architecture, that enables learning a general discrete latent space that jointly models RGB and 3D data for 3D surface anomaly detection. (ii) We tackle the lack of diverse industrial depth datasets by introducing a simulation process for learning informative depth features in the depth encoder. (iii) We propose a new surface anomaly detection method 3DSR, which outperforms all existing state-of-the-art on the challenging MVTec3D anomaly detection benchmark, both in terms of accuracy and processing speed. The experimental results validate the effectiveness and efficiency of our approach, highlighting the potential of utilizing depth information for improved surface anomaly detection.
A Low-Shot Object Counting Network With Iterative Prototype Adaptation
Nov 15, 2022

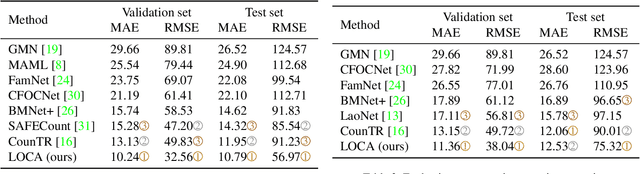

We consider low-shot counting of arbitrary semantic categories in the image using only few annotated exemplars (few-shot) or no exemplars (no-shot). The standard few-shot pipeline follows extraction of appearance queries from exemplars and matching them with image features to infer the object counts. Existing methods extract queries by feature pooling, but neglect the shape information (e.g., size and aspect), which leads to a reduced object localization accuracy and count estimates. We propose a Low-shot Object Counting network with iterative prototype Adaptation (LOCA). Our main contribution is the new object prototype extraction module, which iteratively fuses the exemplar shape and appearance queries with image features. The module is easily adapted to zero-shot scenario, enabling LOCA to cover the entire spectrum of low-shot counting problems. LOCA outperforms all recent state-of-the-art methods on FSC147 benchmark by 20-30% in RMSE on one-shot and few-shot and achieves state-of-the-art on zero-shot scenarios, while demonstrating better generalization capabilities.
DSR -- A dual subspace re-projection network for surface anomaly detection
Aug 02, 2022



The state-of-the-art in discriminative unsupervised surface anomaly detection relies on external datasets for synthesizing anomaly-augmented training images. Such approaches are prone to failure on near-in-distribution anomalies since these are difficult to be synthesized realistically due to their similarity to anomaly-free regions. We propose an architecture based on quantized feature space representation with dual decoders, DSR, that avoids the image-level anomaly synthesis requirement. Without making any assumptions about the visual properties of anomalies, DSR generates the anomalies at the feature level by sampling the learned quantized feature space, which allows a controlled generation of near-in-distribution anomalies. DSR achieves state-of-the-art results on the KSDD2 and MVTec anomaly detection datasets. The experiments on the challenging real-world KSDD2 dataset show that DSR significantly outperforms other unsupervised surface anomaly detection methods, improving the previous top-performing methods by 10% AP in anomaly detection and 35% AP in anomaly localization.
DRÆM -- A discriminatively trained reconstruction embedding for surface anomaly detection
Aug 17, 2021

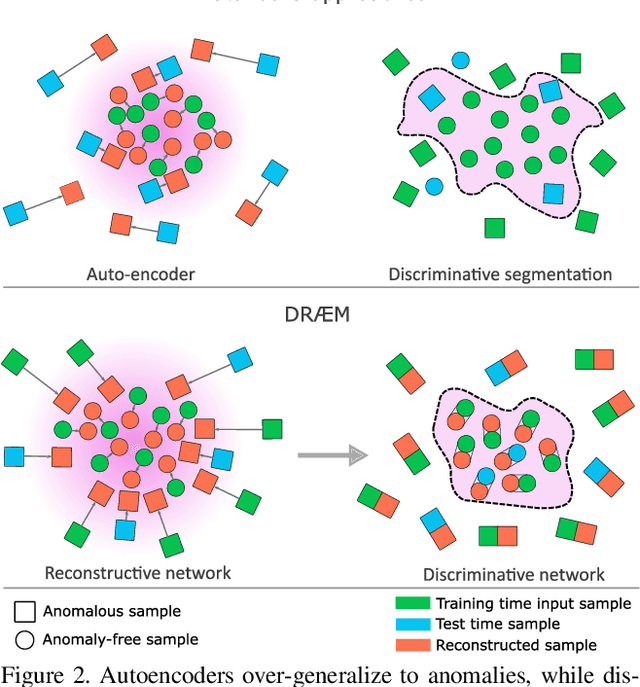

Visual surface anomaly detection aims to detect local image regions that significantly deviate from normal appearance. Recent surface anomaly detection methods rely on generative models to accurately reconstruct the normal areas and to fail on anomalies. These methods are trained only on anomaly-free images, and often require hand-crafted post-processing steps to localize the anomalies, which prohibits optimizing the feature extraction for maximal detection capability. In addition to reconstructive approach, we cast surface anomaly detection primarily as a discriminative problem and propose a discriminatively trained reconstruction anomaly embedding model (DRAEM). The proposed method learns a joint representation of an anomalous image and its anomaly-free reconstruction, while simultaneously learning a decision boundary between normal and anomalous examples. The method enables direct anomaly localization without the need for additional complicated post-processing of the network output and can be trained using simple and general anomaly simulations. On the challenging MVTec anomaly detection dataset, DRAEM outperforms the current state-of-the-art unsupervised methods by a large margin and even delivers detection performance close to the fully-supervised methods on the widely used DAGM surface-defect detection dataset, while substantially outperforming them in localization accuracy.