 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiegetic Graphical User Interfaces and Intuitive Control of Assistive Robots via Eye-gaze
Jan 08, 2024Individuals with tetraplegia and similar forms of paralysis suffer physically and emotionally due to a lack of autonomy. To help regain part of this autonomy, assistive robotic arms have been shown to increase living independence. However, users with paralysis pose unique challenging conditions for the control of these devices. In this article, we present the use of Diegetic Graphical User Interfaces, a novel, intuitive, and computationally inexpensive approach for gaze-controlled interfaces applied to robots. By using symbols paired with fiducial markers, interactive buttons can be defined in the real world which the user can trigger via gaze, and which can be embedded easily into the environment. We apply this system to pilot a 3-degree-of-freedom robotic arm for precision pick-and-place tasks. The interface is placed directly on the robot to allow intuitive and direct interaction, eliminating the need for context-switching between external screens, menus, and the robot. After calibration and a brief habituation period, twenty-one participants from multiple backgrounds, ages and eye-sight conditions completed the Yale-CMU-Berkeley (YCB) Block Pick and Place Protocol to benchmark the system, achieving a mean score of 13.71 out of the maximum 16.00 points. Good usability and user experience were reported (System Usability Score of 75.36) while achieving a low task workload measure (NASA-TLX of 44.76). Results show that users can employ multiple interface elements to perform actions with minimal practice and with a small cognitive load. To our knowledge, this is the first easily reconfigurable screenless system that enables robot control entirely via gaze for Cartesian robot control without the need for eye or face gestures.
A Directional Vibrotactile Feedback Interface for Ergonomic Postural Adjustment
May 04, 2022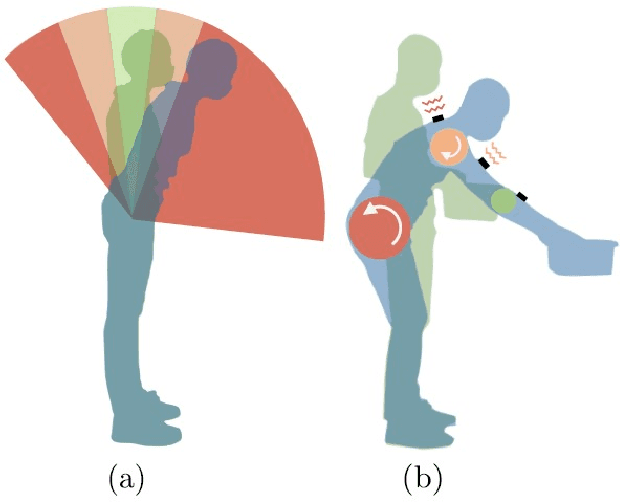
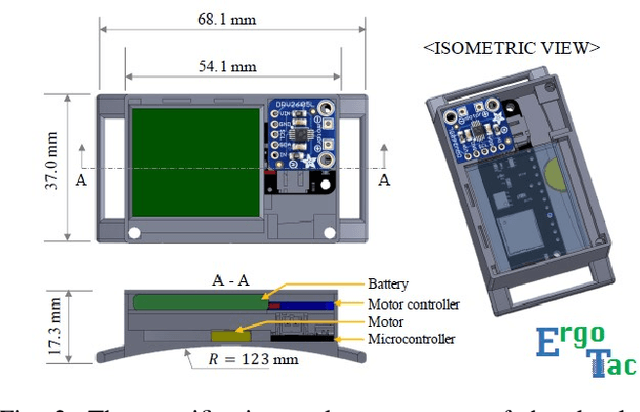
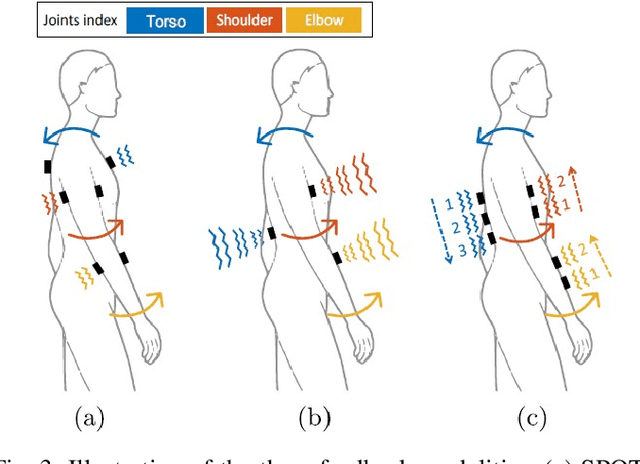
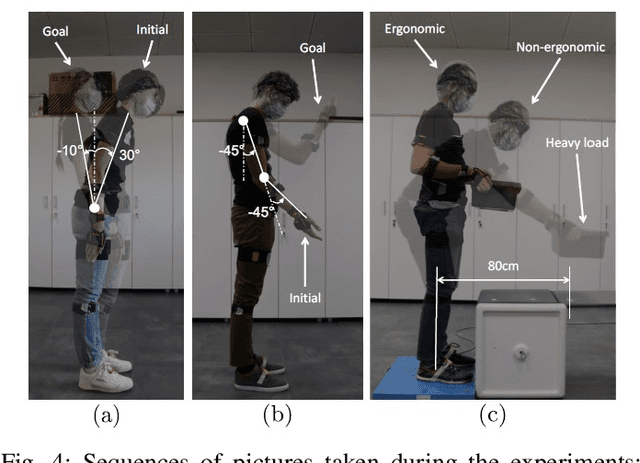
The objective of this paper is to develop and evaluate a directional vibrotactile feedback interface as a guidance tool for postural adjustments during work. In contrast to the existing active and wearable systems such as exoskeletons, we aim to create a lightweight and intuitive interface, capable of guiding its wearers towards more ergonomic and healthy working conditions. To achieve this, a vibrotactile device called ErgoTac is employed to develop three different feedback modalities that are able to provide a directional guidance at the body segments towards a desired pose. In addition, an evaluation is made to find the most suitable, comfortable, and intuitive feedback modality for the user. Therefore, these modalities are first compared experimentally on fifteen subjects wearing eight ErgoTac devices to achieve targeted arm and torso configurations. The most effective directional feedback modality is then evaluated on five subjects in a set of experiments in which an ergonomic optimisation module provides the optimised body posture while performing heavy lifting or forceful exertion tasks. The results yield strong evidence on the usefulness and the intuitiveness of one of the developed modalities in providing guidance towards ergonomic working conditions, by minimising the effect of an external load on body joints. We believe that the integration of such low-cost devices in workplaces can help address the well-known and complex problem of work-related musculoskeletal disorders.
* 12 pages. 13 figures. Now published in IEEE Transactions on Haptics DOI: 10.1109/TOH.2021.3112795