 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVibES: Induced Vibration for Persistent Event-Based Sensing
Aug 26, 2025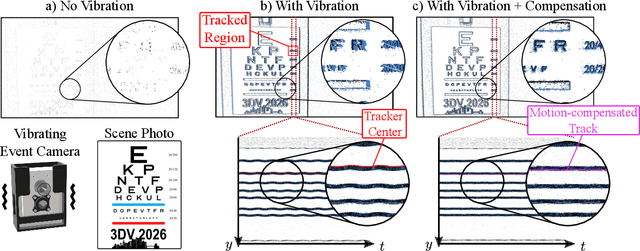
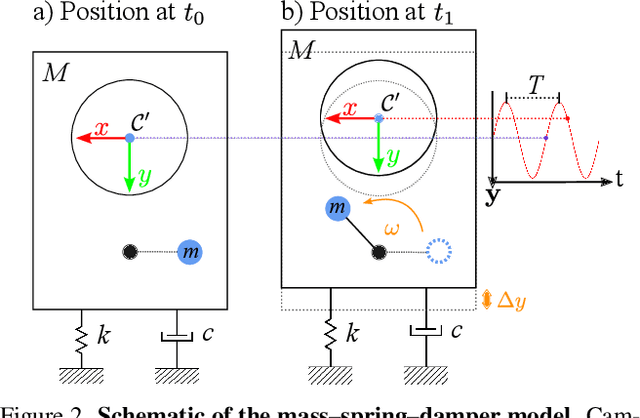
Event cameras are a bio-inspired class of sensors that asynchronously measure per-pixel intensity changes. Under fixed illumination conditions in static or low-motion scenes, rigidly mounted event cameras are unable to generate any events, becoming unsuitable for most computer vision tasks. To address this limitation, recent work has investigated motion-induced event stimulation that often requires complex hardware or additional optical components. In contrast, we introduce a lightweight approach to sustain persistent event generation by employing a simple rotating unbalanced mass to induce periodic vibrational motion. This is combined with a motion-compensation pipeline that removes the injected motion and yields clean, motion-corrected events for downstream perception tasks. We demonstrate our approach with a hardware prototype and evaluate it on real-world captured datasets. Our method reliably recovers motion parameters and improves both image reconstruction and edge detection over event-based sensing without motion induction.
FaVoR: Features via Voxel Rendering for Camera Relocalization
Sep 11, 2024



Camera relocalization methods range from dense image alignment to direct camera pose regression from a query image. Among these, sparse feature matching stands out as an efficient, versatile, and generally lightweight approach with numerous applications. However, feature-based methods often struggle with significant viewpoint and appearance changes, leading to matching failures and inaccurate pose estimates. To overcome this limitation, we propose a novel approach that leverages a globally sparse yet locally dense 3D representation of 2D features. By tracking and triangulating landmarks over a sequence of frames, we construct a sparse voxel map optimized to render image patch descriptors observed during tracking. Given an initial pose estimate, we first synthesize descriptors from the voxels using volumetric rendering and then perform feature matching to estimate the camera pose. This methodology enables the generation of descriptors for unseen views, enhancing robustness to view changes. We extensively evaluate our method on the 7-Scenes and Cambridge Landmarks datasets. Our results show that our method significantly outperforms existing state-of-the-art feature representation techniques in indoor environments, achieving up to a 39% improvement in median translation error. Additionally, our approach yields comparable results to other methods for outdoor scenarios while maintaining lower memory and computational costs.
Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry
Sep 14, 2022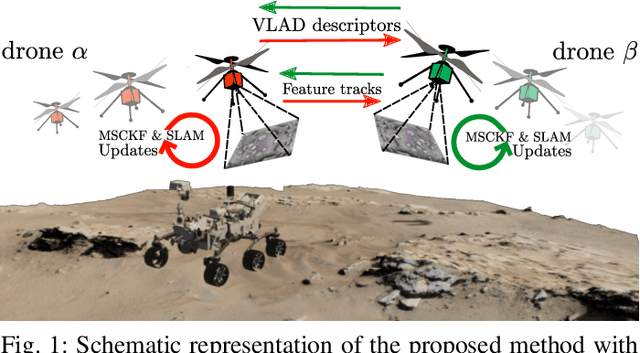
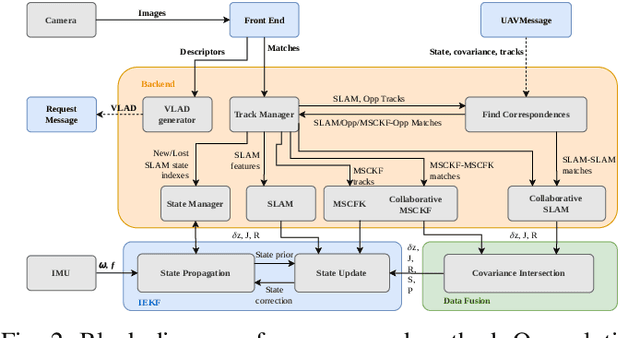
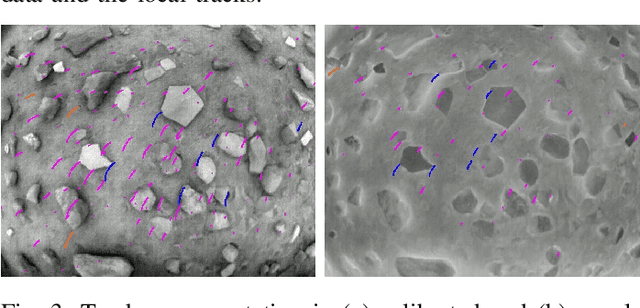
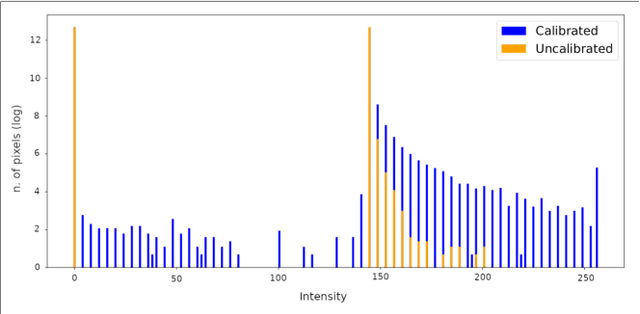
We propose a system solution to achieve data-efficient, decentralized state estimation for a team of flying robots using thermal images and inertial measurements. Each robot can fly independently, and exchange data when possible to refine its state estimate. Our system front-end applies an online photometric calibration to refine the thermal images so as to enhance feature tracking and place recognition. Our system back-end uses a covariance-intersection fusion strategy to neglect the cross-correlation between agents so as to lower memory usage and computational cost. The communication pipeline uses Vector of Locally Aggregated Descriptors (VLAD) to construct a request-response policy that requires low bandwidth usage. We test our collaborative method on both synthetic and real-world data. Our results show that the proposed method improves by up to 46 % trajectory estimation with respect to an individual-agent approach, while reducing up to 89 % the communication exchange. Datasets and code are released to the public, extending the already-public JPL xVIO library.
* 8 pages, 8 figures