 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAQUALOC: An Underwater Dataset for Visual-Inertial-Pressure Localization
Oct 31, 2019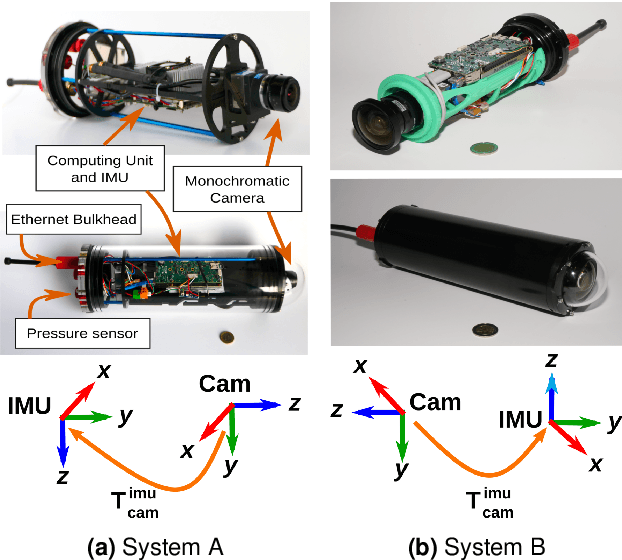
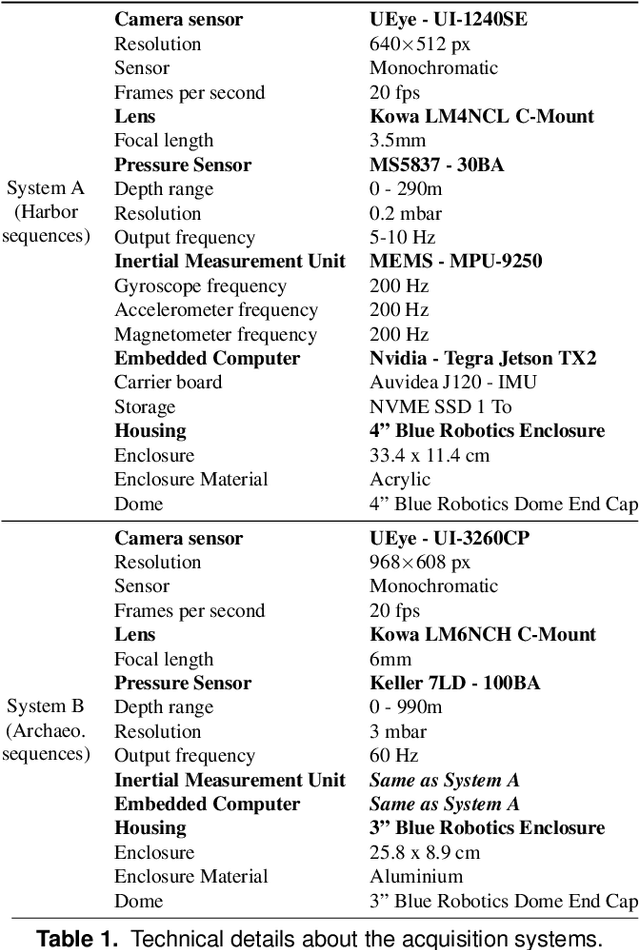
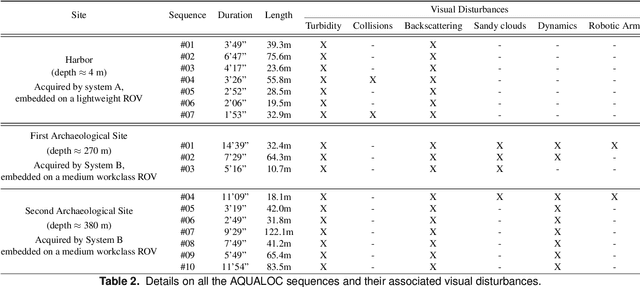
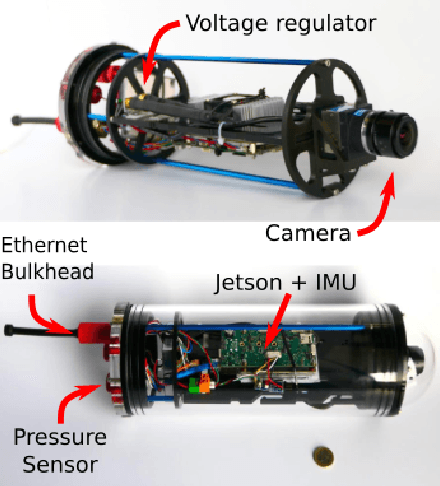
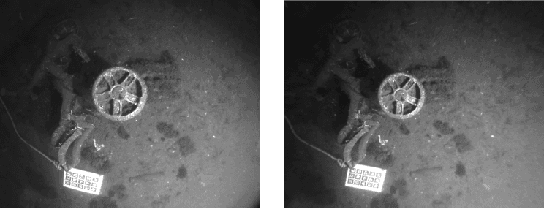
We present a new dataset, dedicated to the development of simultaneous localization and mapping methods for underwater vehicles navigating close to the seabed. The data sequences composing this dataset are recorded in three different environments: a harbor at a depth of a few meters, a first archaeological site at a depth of 270 meters and a second site at a depth of 380 meters. The data acquisition is performed using Remotely Operated Vehicles equipped with a monocular monochromatic camera, a low-cost inertial measurement unit, a pressure sensor and a computing unit, all embedded in a single enclosure. The sensors' measurements are recorded synchronously on the computing unit and seventeen sequences have been created from all the acquired data. These sequences are made available in the form of ROS bags and as raw data. For each sequence, a trajectory has also been computed offline using a Structure-from-Motion library in order to allow the comparison with real-time localization methods. With the release of this dataset, we wish to provide data difficult to acquire and to encourage the development of vision-based localization methods dedicated to the underwater environment. The dataset can be downloaded from: http://www.lirmm.fr/aqualoc/
The Aqualoc Dataset: Towards Real-Time Underwater Localization from a Visual-Inertial-Pressure Acquisition System
Sep 19, 2018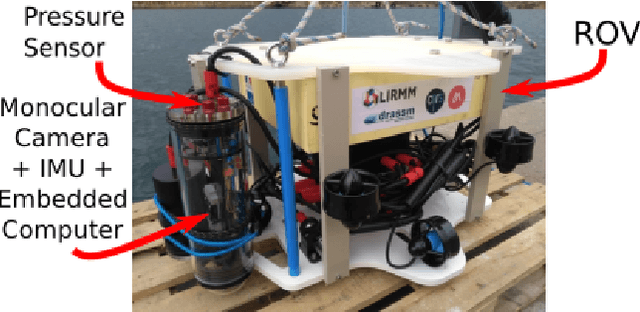
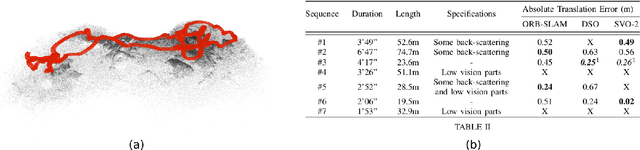
This paper presents a new underwater dataset acquired from a visual-inertial-pressure acquisition system and meant to be used to benchmark visual odometry, visual SLAM and multi-sensors SLAM solutions. The dataset is publicly available and contains ground-truth trajectories for evaluation.
Real-time Monocular Visual Odometry for Turbid and Dynamic Underwater Environments
Jul 03, 2018
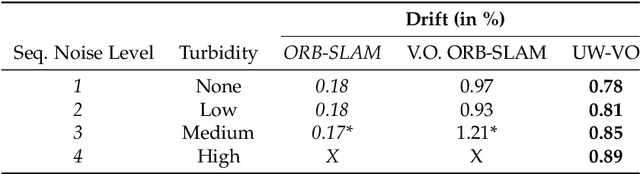

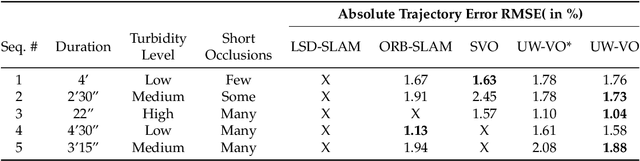
In the context of robotic underwater operations, the visual degradations induced by the medium properties make difficult the exclusive use of cameras for localization purpose. Hence, most localization methods are based on expensive navigational sensors associated with acoustic positioning. On the other hand, visual odometry and visual SLAM have been exhaustively studied for aerial or terrestrial applications, but state-of-the-art algorithms fail underwater. In this paper we tackle the problem of using a simple low-cost camera for underwater localization and propose a new monocular visual odometry method dedicated to the underwater environment. We evaluate different tracking methods and show that optical flow based tracking is more suited to underwater images than classical approaches based on descriptors. We also propose a keyframe-based visual odometry approach highly relying on nonlinear optimization. The proposed algorithm has been assessed on both simulated and real underwater datasets and outperforms state-of-the-art visual SLAM methods under many of the most challenging conditions. The main application of this work is the localization of Remotely Operated Vehicles (ROVs) used for underwater archaeological missions but the developed system can be used in any other applications as long as visual information is available.