Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Aqualoc Dataset: Towards Real-Time Underwater Localization from a Visual-Inertial-Pressure Acquisition System
Paper and Code
Sep 19, 2018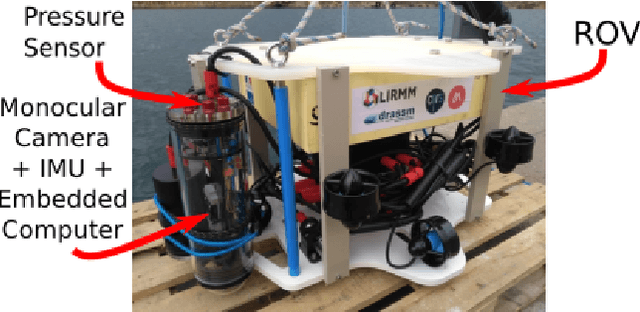
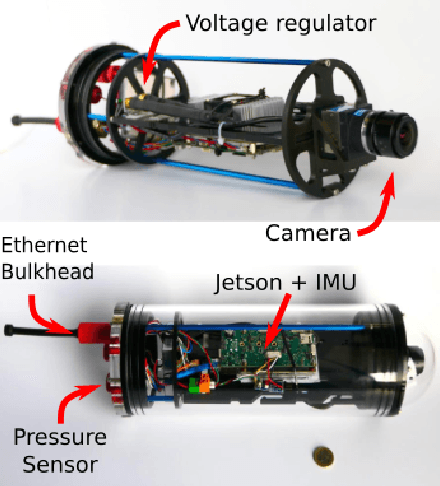
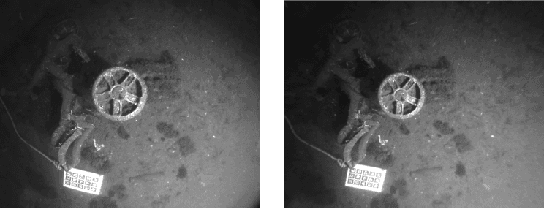
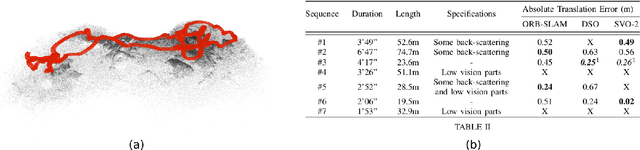
This paper presents a new underwater dataset acquired from a visual-inertial-pressure acquisition system and meant to be used to benchmark visual odometry, visual SLAM and multi-sensors SLAM solutions. The dataset is publicly available and contains ground-truth trajectories for evaluation.
* IROS Workshop - New Horizons for Underwater Intervention Missions:
from Current Technologies to Future Applications, Oct 2018, Madrid, Spain
View paper on