 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow a Bit Becomes a Story: Semantic Steering via Differentiable Fault Injection
Dec 09, 2025Hard-to-detect hardware bit flips, from either malicious circuitry or bugs, have already been shown to make transformers vulnerable in non-generative tasks. This work, for the first time, investigates how low-level, bitwise perturbations (fault injection) to the weights of a large language model (LLM) used for image captioning can influence the semantic meaning of its generated descriptions while preserving grammatical structure. While prior fault analysis methods have shown that flipping a few bits can crash classifiers or degrade accuracy, these approaches overlook the semantic and linguistic dimensions of generative systems. In image captioning models, a single flipped bit might subtly alter how visual features map to words, shifting the entire narrative an AI tells about the world. We hypothesize that such semantic drifts are not random but differentiably estimable. That is, the model's own gradients can predict which bits, if perturbed, will most strongly influence meaning while leaving syntax and fluency intact. We design a differentiable fault analysis framework, BLADE (Bit-level Fault Analysis via Differentiable Estimation), that uses gradient-based sensitivity estimation to locate semantically critical bits and then refines their selection through a caption-level semantic-fluency objective. Our goal is not merely to corrupt captions, but to understand how meaning itself is encoded, distributed, and alterable at the bit level, revealing that even imperceptible low-level changes can steer the high-level semantics of generative vision-language models. It also opens pathways for robustness testing, adversarial defense, and explainable AI, by exposing how structured bit-level faults can reshape a model's semantic output.
Omobot: a low-cost mobile robot for autonomous search and fall detection
Aug 09, 2024Detecting falls among the elderly and alerting their community responders can save countless lives. We design and develop a low-cost mobile robot that periodically searches the house for the person being monitored and sends an email to a set of designated responders if a fall is detected. In this project, we make three novel design decisions and contributions. First, our custom-designed low-cost robot has advanced features like omnidirectional wheels, the ability to run deep learning models, and autonomous wireless charging. Second, we improve the accuracy of fall detection for the YOLOv8-Pose-nano object detection network by 6% and YOLOv8-Pose-large by 12%. We do so by transforming the images captured from the robot viewpoint (camera height 0.15m from the ground) to a typical human viewpoint (1.5m above the ground) using a principally computed Homography matrix. This improves network accuracy because the training dataset MS-COCO on which YOLOv8-Pose is trained is captured from a human-height viewpoint. Lastly, we improve the robot controller by learning a model that predicts the robot velocity from the input signal to the motor controller.
Cross-view geo-localization: a survey
Jun 14, 2024Cross-view geo-localization has garnered notable attention in the realm of computer vision, spurred by the widespread availability of copious geotagged datasets and the advancements in machine learning techniques. This paper provides a thorough survey of cutting-edge methodologies, techniques, and associated challenges that are integral to this domain, with a focus on feature-based and deep learning strategies. Feature-based methods capitalize on unique features to establish correspondences across disparate viewpoints, whereas deep learning-based methodologies deploy convolutional neural networks to embed view-invariant attributes. This work also delineates the multifaceted challenges encountered in cross-view geo-localization, such as variations in viewpoints and illumination, the occurrence of occlusions, and it elucidates innovative solutions that have been formulated to tackle these issues. Furthermore, we delineate benchmark datasets and relevant evaluation metrics, and also perform a comparative analysis of state-of-the-art techniques. Finally, we conclude the paper with a discussion on prospective avenues for future research and the burgeoning applications of cross-view geo-localization in an intricately interconnected global landscape.
Trends in deep learning for medical hyperspectral image analysis
Nov 27, 2020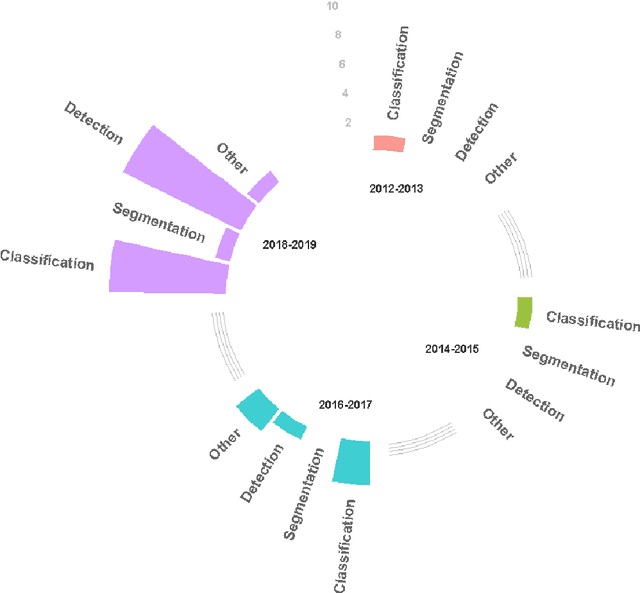
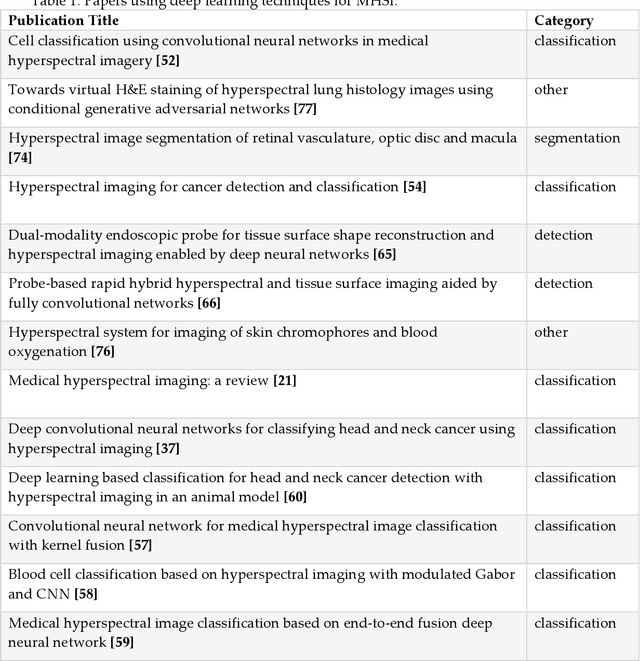
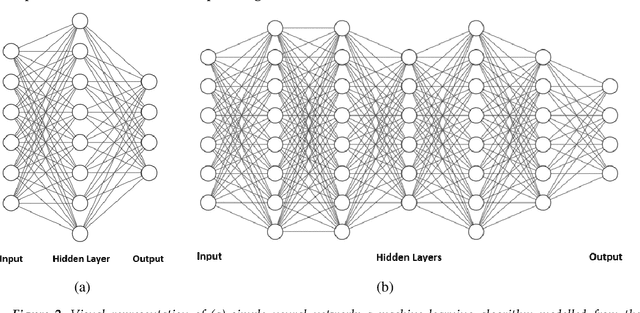
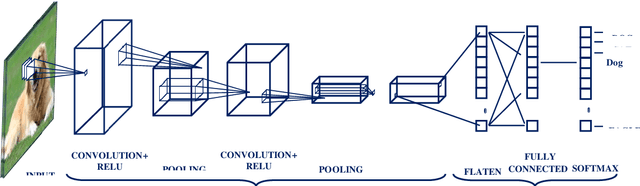
Deep learning algorithms have seen acute growth of interest in their applications throughout several fields of interest in the last decade, with medical hyperspectral imaging being a particularly promising domain. So far, to the best of our knowledge, there is no review paper that discusses the implementation of deep learning for medical hyperspectral imaging, which is what this review paper aims to accomplish by examining publications that currently utilize deep learning to perform effective analysis of medical hyperspectral imagery. This paper discusses deep learning concepts that are relevant and applicable to medical hyperspectral imaging analysis, several of which have been implemented since the boom in deep learning. This will comprise of reviewing the use of deep learning for classification, segmentation, and detection in order to investigate the analysis of medical hyperspectral imaging. Lastly, we discuss the current and future challenges pertaining to this discipline and the possible efforts to overcome such trials.
U-Net and its variants for medical image segmentation: theory and applications
Nov 02, 2020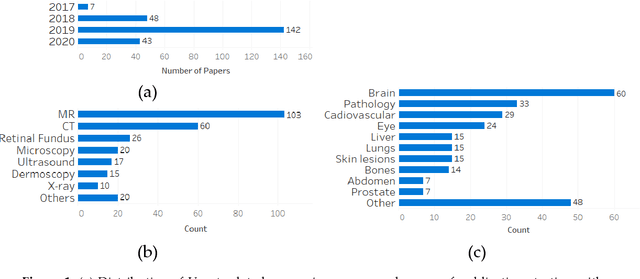
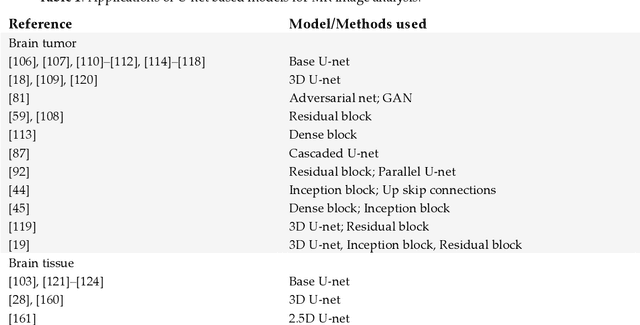
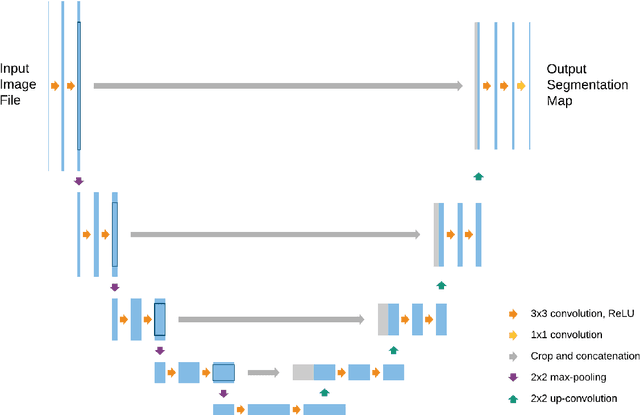
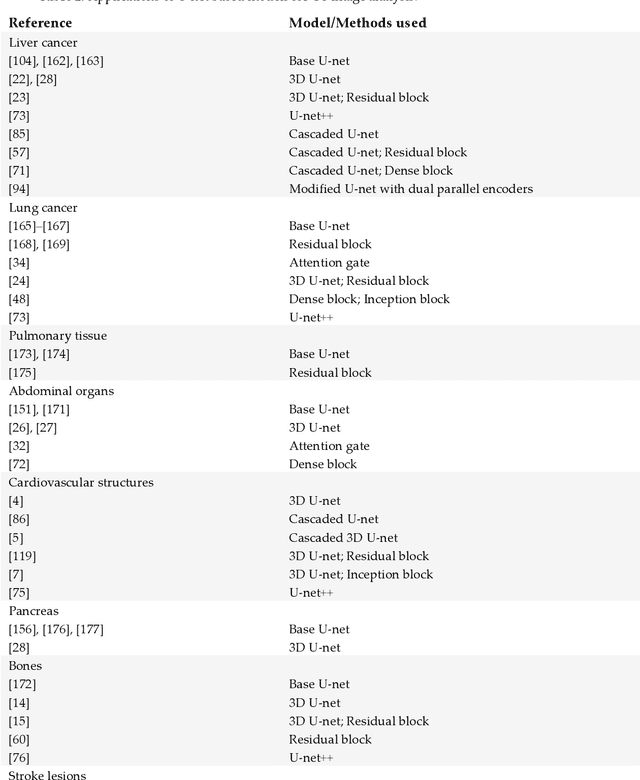
U-net is an image segmentation technique developed primarily for medical image analysis that can precisely segment images using a scarce amount of training data. These traits provide U-net with a very high utility within the medical imaging community and have resulted in extensive adoption of U-net as the primary tool for segmentation tasks in medical imaging. The success of U-net is evident in its widespread use in all major image modalities from CT scans and MRI to X-rays and microscopy. Furthermore, while U-net is largely a segmentation tool, there have been instances of the use of U-net in other applications. As the potential of U-net is still increasing, in this review we look at the various developments that have been made in the U-net architecture and provide observations on recent trends. We examine the various innovations that have been made in deep learning and discuss how these tools facilitate U-net. Furthermore, we look at image modalities and application areas where U-net has been applied.
Effects of Voice-Based Synthetic Assistant on Performance of Emergency Care Provider in Training
Aug 12, 2020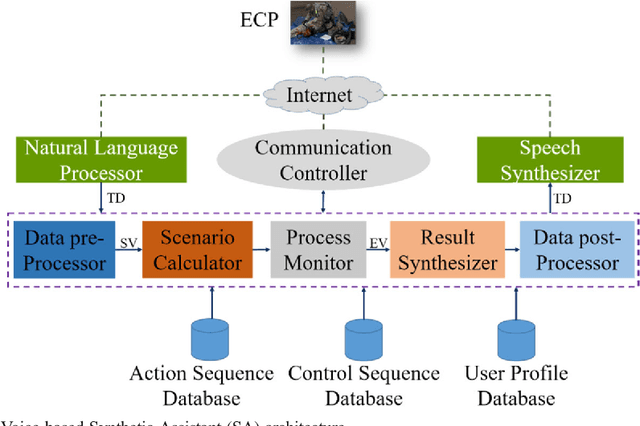
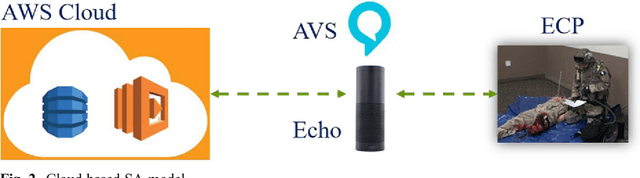
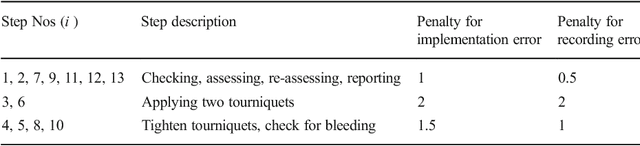
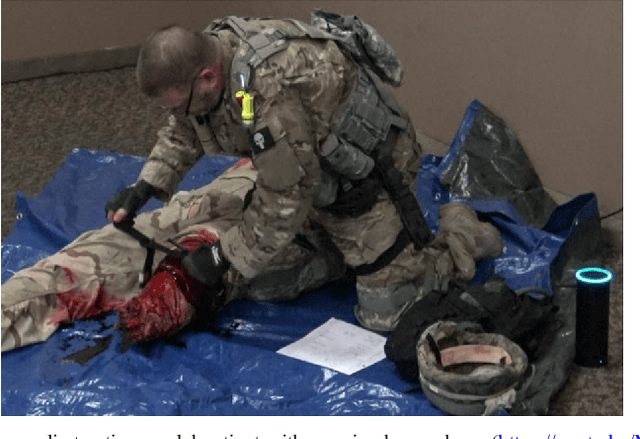
As part of a perennial project, our team is actively engaged in developing new synthetic assistant (SA) technologies to assist in training combat medics and medical first responders. It is critical that medical first responders are well trained to deal with emergencies more effectively. This would require real-time monitoring and feedback for each trainee. Therefore, we introduced a voice-based SA to augment the training process of medical first responders and enhance their performance in the field. The potential benefits of SAs include a reduction in training costs and enhanced monitoring mechanisms. Despite the increased usage of voice-based personal assistants (PAs) in day-to-day life, the associated effects are commonly neglected for a study of human factors. Therefore, this paper focuses on performance analysis of the developed voice-based SA in emergency care provider training for a selected emergency treatment scenario. The research discussed in this paper follows design science in developing proposed technology; at length, we discussed architecture and development and presented working results of voice-based SA. The empirical testing was conducted on two groups as user studies using statistical analysis tools, one trained with conventional methods and the other with the help of SA. The statistical results demonstrated the amplification in training efficacy and performance of medical responders powered by SA. Furthermore, the paper also discusses the accuracy and time of task execution (t) and concludes with the guidelines for resolving the identified problems.
Particle Swarm Optimized Power Consumption of Trilateration
Feb 08, 2016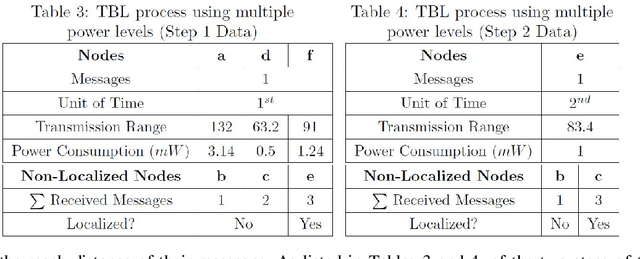

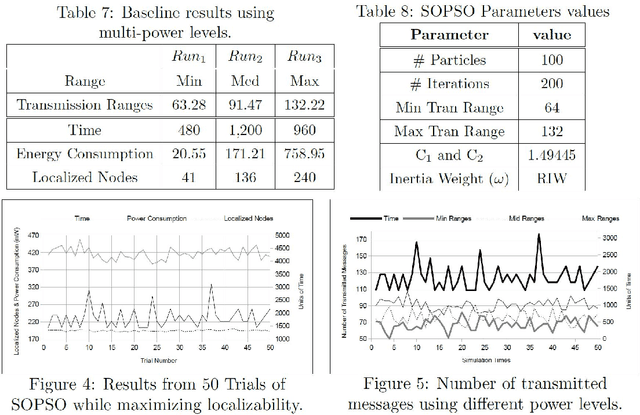
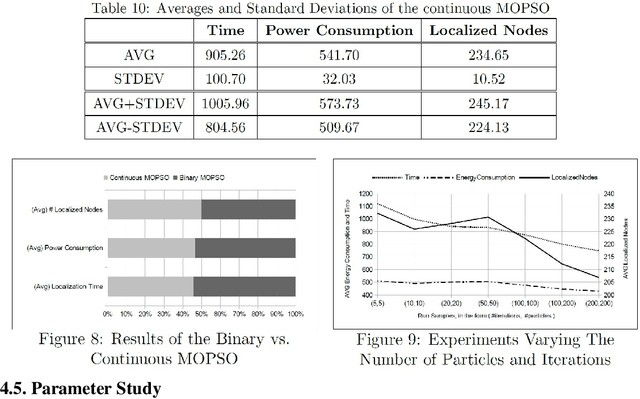
Trilateration-based localization (TBL) has become a corner stone of modern technology. This study formulates the concern on how wireless sensor networks can take advantage of the computational intelligent techniques using both single- and multi-objective particle swarm optimization (PSO) with an overall aim of concurrently minimizing the required time for localization, minimizing energy consumed during localization, and maximizing the number of nodes fully localized through the adjustment of wireless sensor transmission ranges while using TBL process. A parameter-study of the applied PSO variants is performed, leading to results that show algorithmic improvements of up to 32% in the evaluated objectives.
* 19 Pages, 13 Figures, 10 Tables, Journal