 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA BlueROV2-based platform for underwater mapping experiments
Jul 15, 2024We propose a low-cost laboratory platform for development and validation of underwater mapping techniques, using the BlueROV2 Remotely Operated Vehicle (ROV). Both the ROV and the objects to be mapped are placed in a pool that is imaged via an overhead camera. In our prototype mapping application, the ROV's pose is found using extended Kalman filtering on measurements from the overhead camera, inertial, and pressure sensors; while objects are detected with a deep neural network in the ROV camera stream. Validation experiments are performed for pose estimation, detection, and mapping. The litter detection dataset and code are made publicly available.
Underwater Robot Pose Estimation Using Acoustic Methods and Intermittent Position Measurements at the Surface
Dec 18, 2023Global positioning systems can provide sufficient positioning accuracy for large scale robotic tasks in open environments. However, in underwater environments, these systems cannot be directly used, and measuring the position of underwater robots becomes more difficult. In this paper we first evaluate the performance of existing pose estimation techniques for an underwater robot equipped with commonly used sensors for underwater control and pose estimation, in a simulated environment. In our case these sensors are inertial measurement units, Doppler velocity log sensors, and ultra-short baseline sensors. Secondly, for situations in which underwater estimation suffers from drift, we investigate the benefit of intermittently correcting the position using a high-precision surface-based sensor, such as regular GPS or an assisting unmanned aerial vehicle that tracks the underwater robot from above using a camera.
Two-Channel Extended Kalman Filtering with Intermittent Measurements
Dec 18, 2023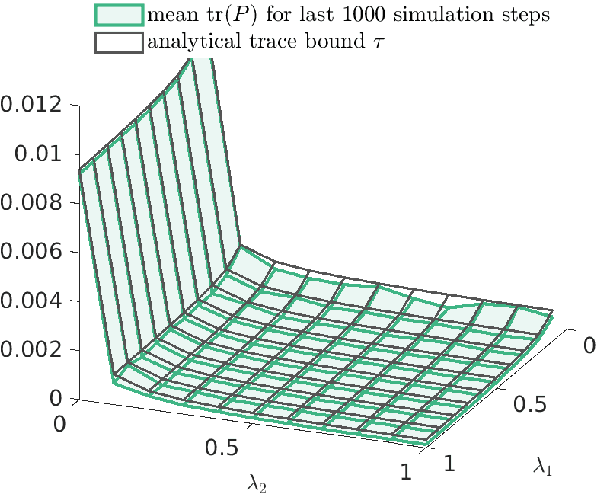
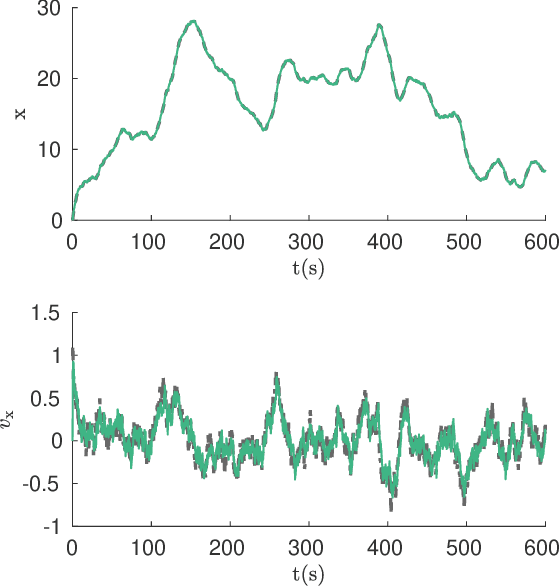
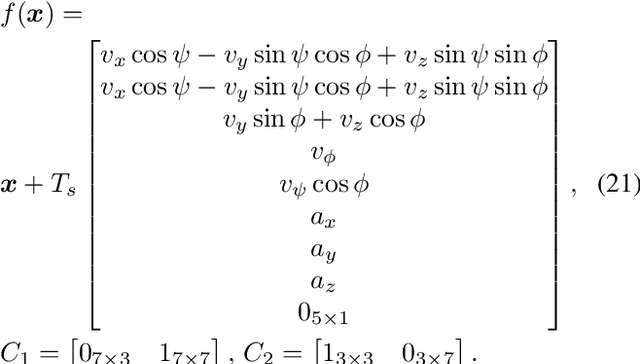
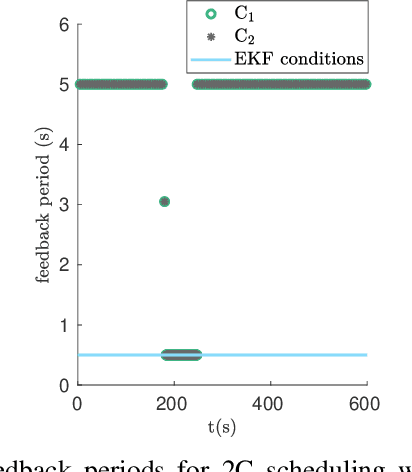
We consider two nonlinear state estimation problems in a setting where an extended Kalman filter receives measurements from two sets of sensors via two channels (2C). In the stochastic-2C problem, the channels drop measurements stochastically, whereas in 2C scheduling, the estimator chooses when to read each channel. In the first problem, we generalize linear-case 2C analysis to obtain -- for a given pair of channel arrival rates -- boundedness conditions for the trace of the error covariance, as well as a worst-case upper bound. For scheduling, an optimization problem is solved to find arrival rates that balance low channel usage with low trace bounds, and channels are read deterministically with the expected periods corresponding to these arrival rates. We validate both solutions in simulations for linear and nonlinear dynamics; as well as in a real experiment with an underwater robot whose position is being intermittently found in a UAV camera image.