 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Neural Networks and Tree Search for Task and Motion Planning in Challenging Environments
Mar 22, 2017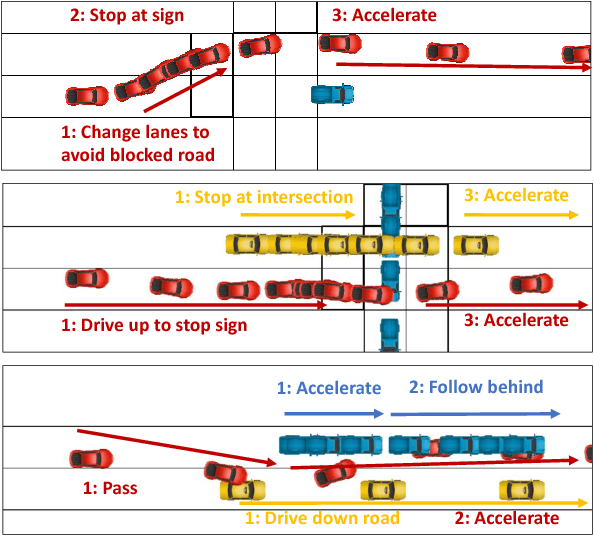
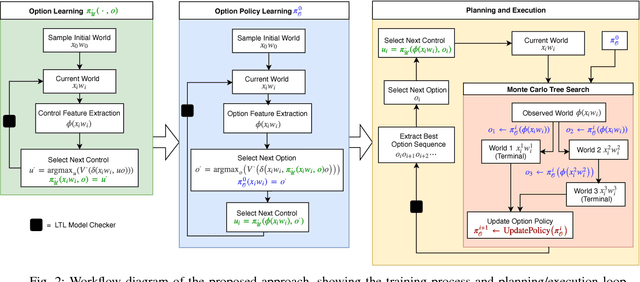
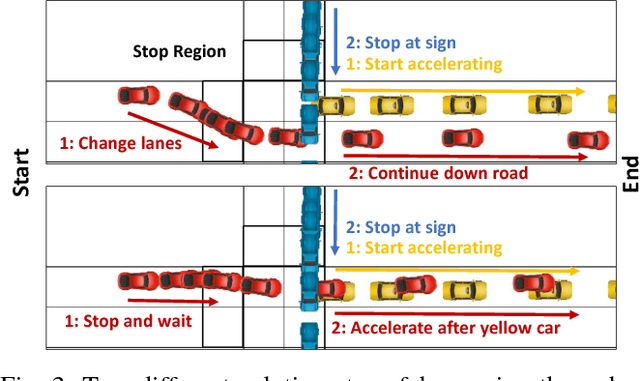
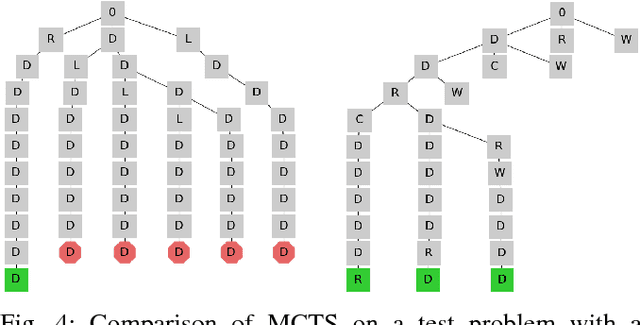
We consider task and motion planning in complex dynamic environments for problems expressed in terms of a set of Linear Temporal Logic (LTL) constraints, and a reward function. We propose a methodology based on reinforcement learning that employs deep neural networks to learn low-level control policies as well as task-level option policies. A major challenge in this setting, both for neural network approaches and classical planning, is the need to explore future worlds of a complex and interactive environment. To this end, we integrate Monte Carlo Tree Search with hierarchical neural net control policies trained on expressive LTL specifications. This paper investigates the ability of neural networks to learn both LTL constraints and control policies in order to generate task plans in complex environments. We demonstrate our approach in a simulated autonomous driving setting, where a vehicle must drive down a road in traffic, avoid collisions, and navigate an intersection, all while obeying given rules of the road.
Unsynthesizable Cores - Minimal Explanations for Unsynthesizable High-Level Robot Behaviors
Sep 04, 2014


With the increasing ubiquity of multi-capable, general-purpose robots arises the need for enabling non-expert users to command these robots to perform complex high-level tasks. To this end, high-level robot control has seen the application of formal methods to automatically synthesize correct-by-construction controllers from user-defined specifications; synthesis fails if and only if there exists no controller that achieves the specified behavior. Recent work has also addressed the challenge of providing easy-to-understand feedback to users when a specification fails to yield a corresponding controller. Existing techniques provide feedback on portions of the specification that cause the failure, but do so at a coarse granularity. This work presents techniques for refining this feedback, extracting minimal explanations of unsynthesizability.
Low-Effort Specification Debugging and Analysis
Jul 21, 2014


Reactive synthesis deals with the automated construction of implementations of reactive systems from their specifications. To make the approach feasible in practice, systems engineers need effective and efficient means of debugging these specifications. In this paper, we provide techniques for report-based specification debugging, wherein salient properties of a specification are analyzed, and the result presented to the user in the form of a report. This provides a low-effort way to debug specifications, complementing high-effort techniques including the simulation of synthesized implementations. We demonstrate the usefulness of our report-based specification debugging toolkit by providing examples in the context of generalized reactivity(1) synthesis.
* In Proceedings SYNT 2014, arXiv:1407.4937