 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimizing Communication while Maximizing Performance in Multi-Agent Reinforcement Learning
Jun 18, 2021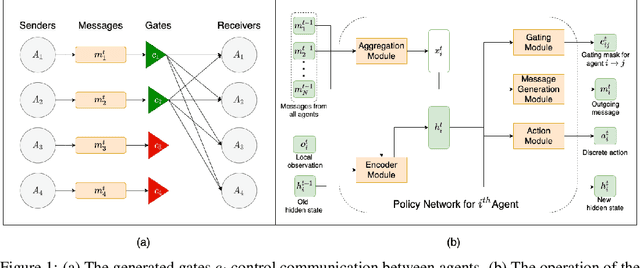
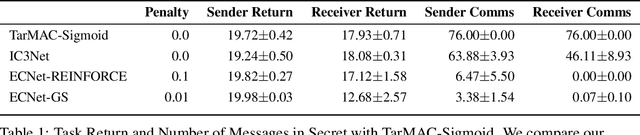
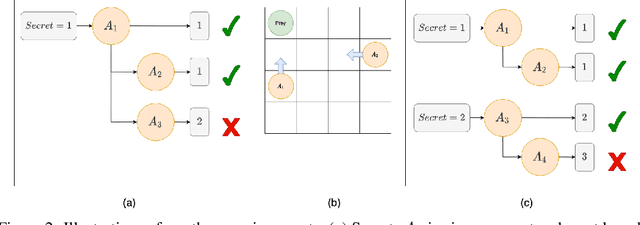
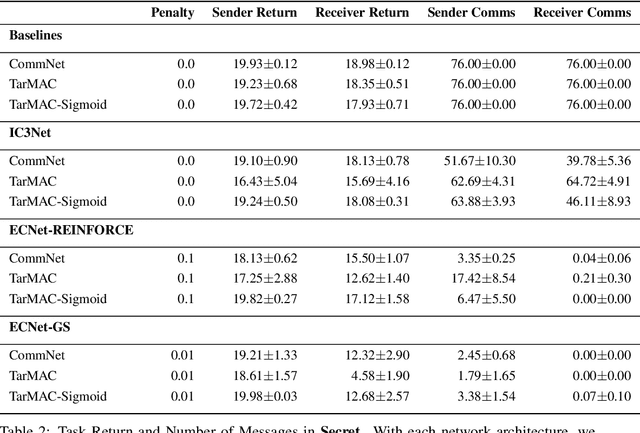
Inter-agent communication can significantly increase performance in multi-agent tasks that require co-ordination to achieve a shared goal. Prior work has shown that it is possible to learn inter-agent communication protocols using multi-agent reinforcement learning and message-passing network architectures. However, these models use an unconstrained broadcast communication model, in which an agent communicates with all other agents at every step, even when the task does not require it. In real-world applications, where communication may be limited by system constraints like bandwidth, power and network capacity, one might need to reduce the number of messages that are sent. In this work, we explore a simple method of minimizing communication while maximizing performance in multi-task learning: simultaneously optimizing a task-specific objective and a communication penalty. We show that the objectives can be optimized using Reinforce and the Gumbel-Softmax reparameterization. We introduce two techniques to stabilize training: 50% training and message forwarding. Training with the communication penalty on only 50% of the episodes prevents our models from turning off their outgoing messages. Second, repeating messages received previously helps models retain information, and further improves performance. With these techniques, we show that we can reduce communication by 75% with no loss of performance.
Generalization to Novel Objects using Prior Relational Knowledge
Jun 26, 2019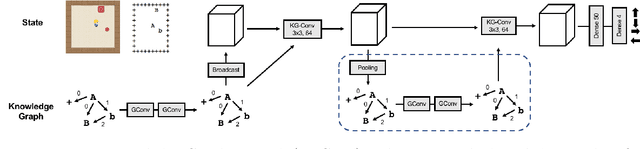
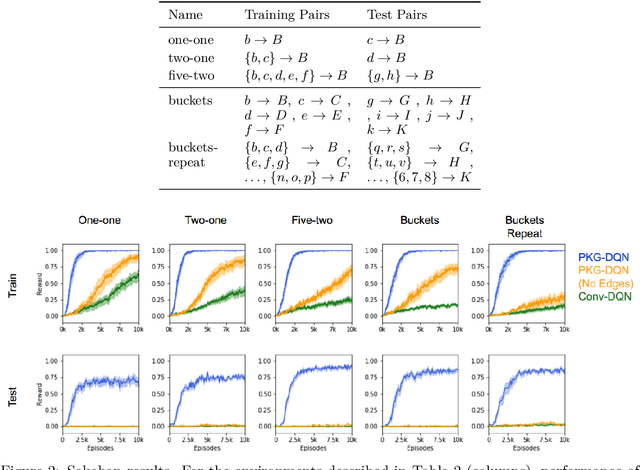
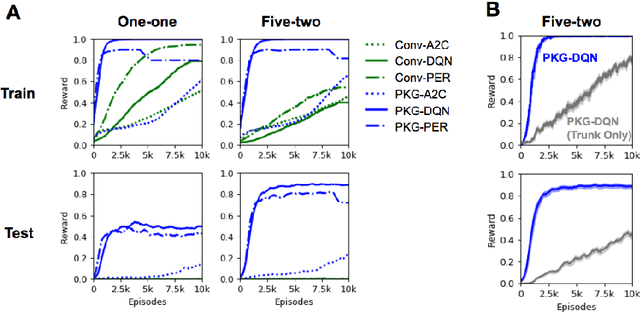

To solve tasks in new environments involving objects unseen during training, agents must reason over prior information about those objects and their relations. We introduce the Prior Knowledge Graph network, an architecture for combining prior information, structured as a knowledge graph, with a symbolic parsing of the visual scene, and demonstrate that this approach is able to apply learned relations to novel objects whereas the baseline algorithms fail. Ablation experiments show that the agents ground the knowledge graph relations to semantically-relevant behaviors. In both a Sokoban game and the more complex Pacman environment, our network is also more sample efficient than the baselines, reaching the same performance in 5-10x fewer episodes. Once the agents are trained with our approach, we can manipulate agent behavior by modifying the knowledge graph in semantically meaningful ways. These results suggest that our network provides a framework for agents to reason over structured knowledge graphs while still leveraging gradient based learning approaches.