 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollowing the Human Thread in Social Navigation
Apr 17, 2024


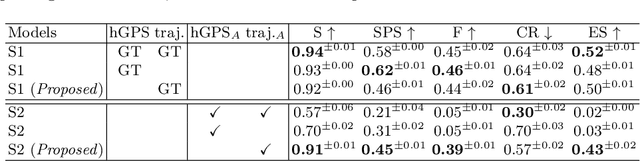
The success of collaboration between humans and robots in shared environments relies on the robot's real-time adaptation to human motion. Specifically, in Social Navigation, the agent should be close enough to assist but ready to back up to let the human move freely, avoiding collisions. Human trajectories emerge as crucial cues in Social Navigation, but they are partially observable from the robot's egocentric view and computationally complex to process. We propose the first Social Dynamics Adaptation model (SDA) based on the robot's state-action history to infer the social dynamics. We propose a two-stage Reinforcement Learning framework: the first learns to encode the human trajectories into social dynamics and learns a motion policy conditioned on this encoded information, the current status, and the previous action. Here, the trajectories are fully visible, i.e., assumed as privileged information. In the second stage, the trained policy operates without direct access to trajectories. Instead, the model infers the social dynamics solely from the history of previous actions and statuses in real-time. Tested on the novel Habitat 3.0 platform, SDA sets a novel state of the art (SoA) performance in finding and following humans.