 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Reasons Help Improve Pedestrian Intent Estimation? A Cross-Modal Approach
Nov 20, 2024



With the increased importance of autonomous navigation systems has come an increasing need to protect the safety of Vulnerable Road Users (VRUs) such as pedestrians. Predicting pedestrian intent is one such challenging task, where prior work predicts the binary cross/no-cross intention with a fusion of visual and motion features. However, there has been no effort so far to hedge such predictions with human-understandable reasons. We address this issue by introducing a novel problem setting of exploring the intuitive reasoning behind a pedestrian's intent. In particular, we show that predicting the 'WHY' can be very useful in understanding the 'WHAT'. To this end, we propose a novel, reason-enriched PIE++ dataset consisting of multi-label textual explanations/reasons for pedestrian intent. We also introduce a novel multi-task learning framework called MINDREAD, which leverages a cross-modal representation learning framework for predicting pedestrian intent as well as the reason behind the intent. Our comprehensive experiments show significant improvement of 5.6% and 7% in accuracy and F1-score for the task of intent prediction on the PIE++ dataset using MINDREAD. We also achieved a 4.4% improvement in accuracy on a commonly used JAAD dataset. Extensive evaluation using quantitative/qualitative metrics and user studies shows the effectiveness of our approach.
GAMMA: Generative Augmentation for Attentive Marine Debris Detection
Dec 07, 2022
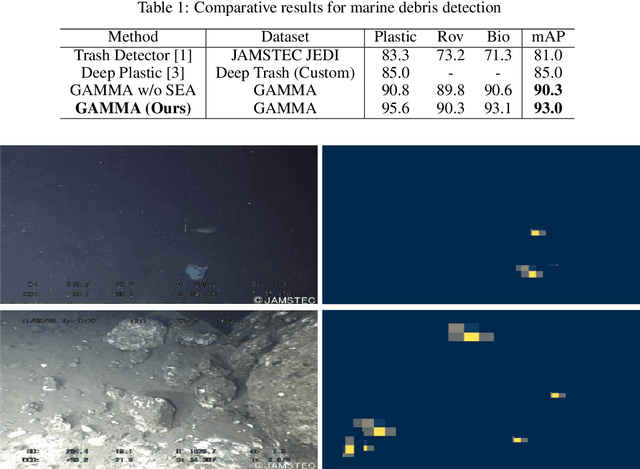


We propose an efficient and generative augmentation approach to solve the inadequacy concern of underwater debris data for visual detection. We use cycleGAN as a data augmentation technique to convert openly available, abundant data of terrestrial plastic to underwater-style images. Prior works just focus on augmenting or enhancing existing data, which moreover adds bias to the dataset. Compared to our technique, which devises variation, transforming additional in-air plastic data to the marine background. We also propose a novel architecture for underwater debris detection using an attention mechanism. Our method helps to focus only on relevant instances of the image, thereby enhancing the detector performance, which is highly obliged while detecting the marine debris using Autonomous Underwater Vehicle (AUV). We perform extensive experiments for marine debris detection using our approach. Quantitative and qualitative results demonstrate the potential of our framework that significantly outperforms the state-of-the-art methods.