 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn information model for modular robots: the Hardware Robot Information Model
Feb 16, 2018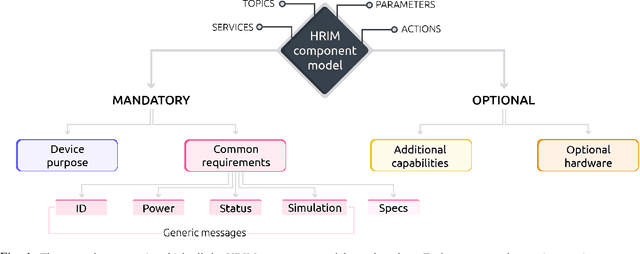
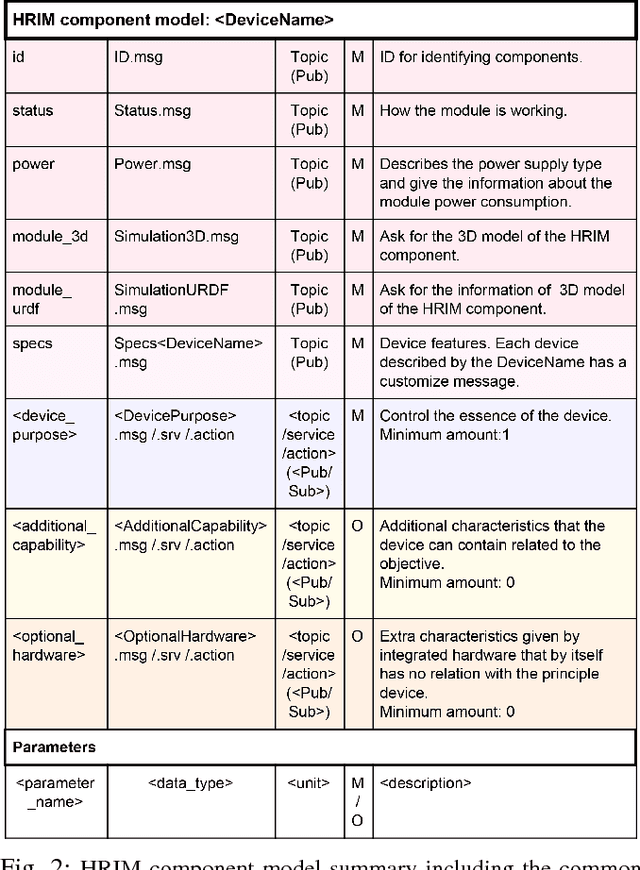
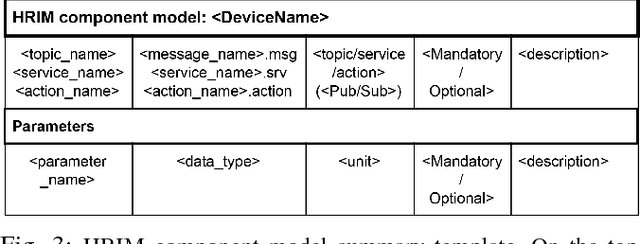
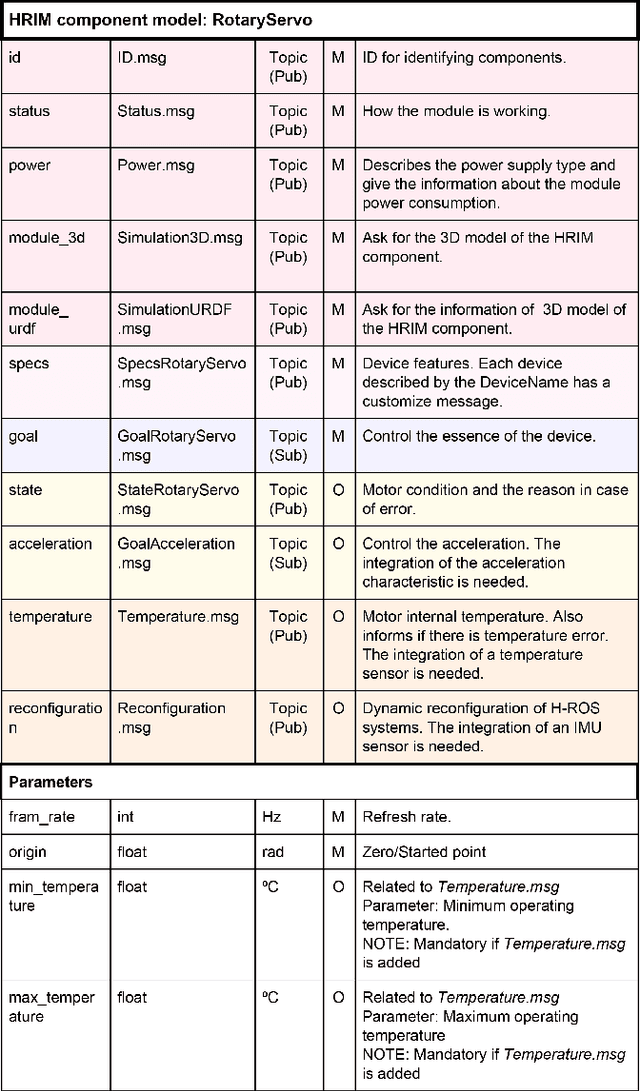
Today's landscape of robotics is dominated by vertical integration where single vendors develop the final product leading to slow progress, expensive products and customer lock-in. Opposite to this, an horizontal integration would result in a rapid development of cost-effective mass-market products with an additional consumer empowerment. The transition of an industry from vertical integration to horizontal integration is typically catalysed by de facto industry standards that enable a simplified and seamless integration of products. However, in robotics there is currently no leading candidate for a global plug-and-play standard. This paper tackles the problem of incompatibility between robot components that hinder the reconfigurability and flexibility demanded by the robotics industry. Particularly, it presents a model to create plug-and-play robot hardware components. Rather than iteratively evolving previous ontologies, our proposed model answers the needs identified by the industry while facilitating interoperability, measurability and comparability of robotics technology. Our approach differs significantly with the ones presented before as it is hardware-oriented and establishes a clear set of actions towards the integration of this model in real environments and with real manufacturers.
Hierarchical Learning for Modular Robots
Feb 12, 2018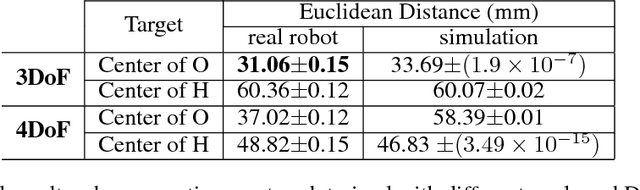
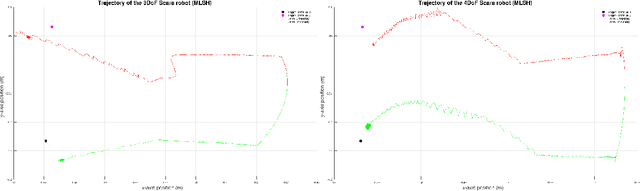
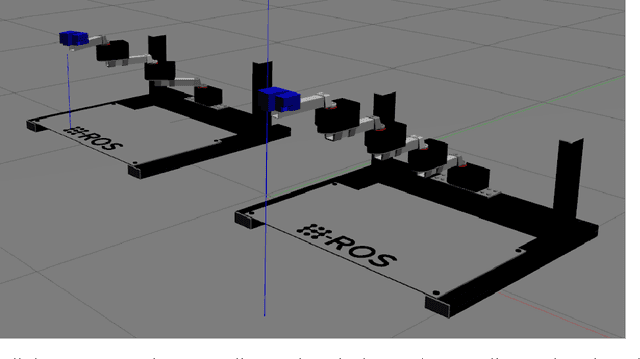
We argue that hierarchical methods can become the key for modular robots achieving reconfigurability. We present a hierarchical approach for modular robots that allows a robot to simultaneously learn multiple tasks. Our evaluation results present an environment composed of two different modular robot configurations, namely 3 degrees-of-freedom (DoF) and 4DoF with two corresponding targets. During the training, we switch between configurations and targets aiming to evaluate the possibility of training a neural network that is able to select appropriate motor primitives and robot configuration to achieve the target. The trained neural network is then transferred and executed on a real robot with 3DoF and 4DoF configurations. We demonstrate how this technique generalizes to robots with different configurations and tasks.
Towards self-adaptable robots: from programming to training machines
Feb 12, 2018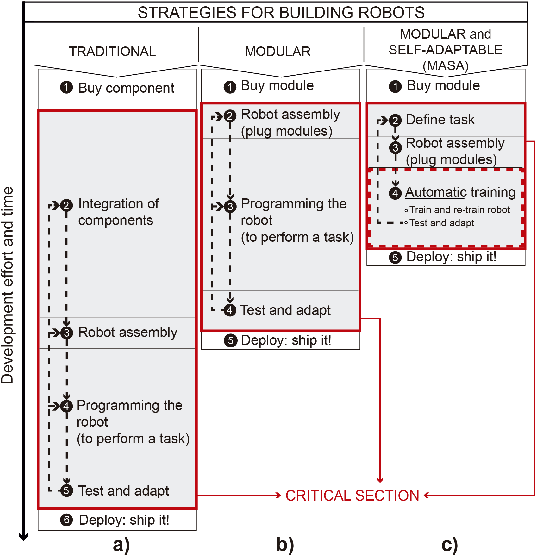
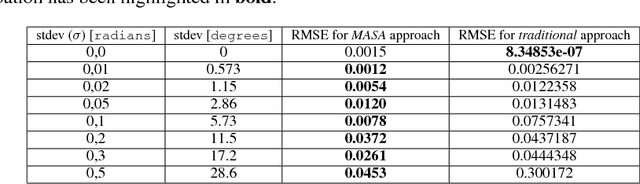
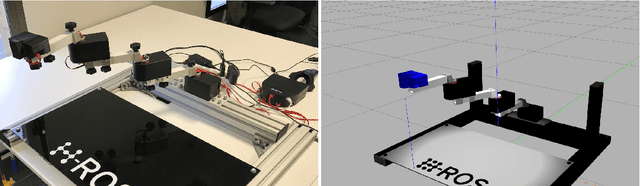
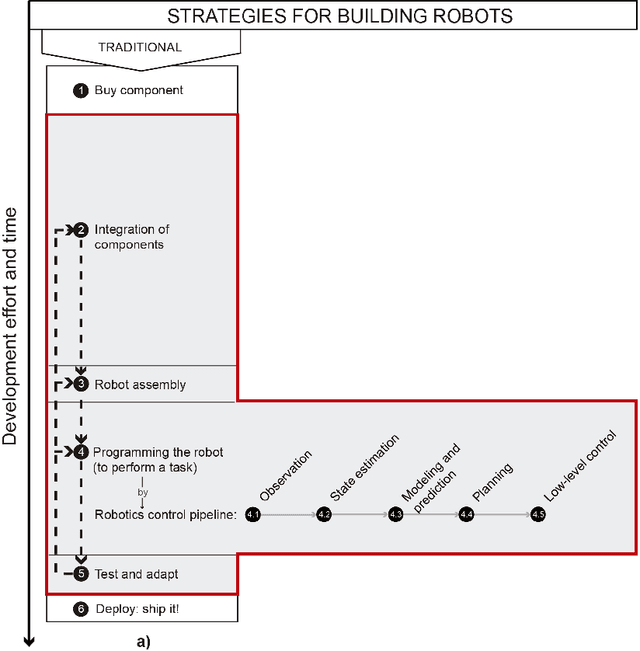
We argue that hardware modularity plays a key role in the convergence of Robotics and Artificial Intelligence (AI). We introduce a new approach for building robots that leads to more adaptable and capable machines. We present the concept of a self-adaptable robot that makes use of hardware modularity and AI techniques to reduce the effort and time required to be built. We demonstrate in simulation and with a real robot how, rather than programming, training produces behaviors in the robot that generalize fast and produce robust outputs in the presence of noise. In particular, we advocate for mammals.
Evaluation of Deep Reinforcement Learning Methods for Modular Robots
Feb 07, 2018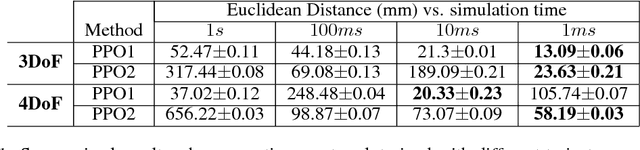
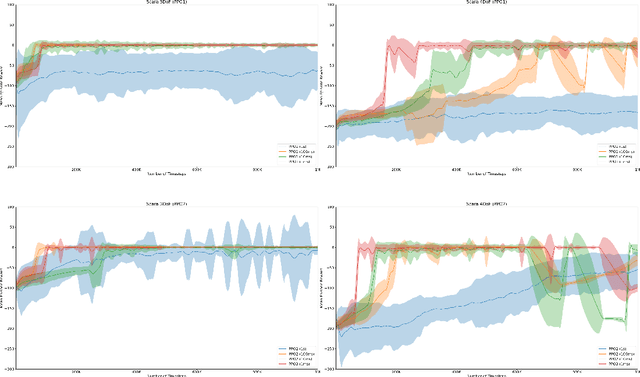
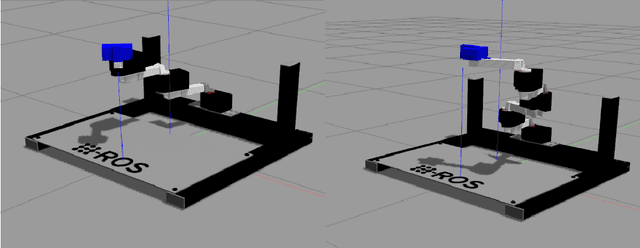
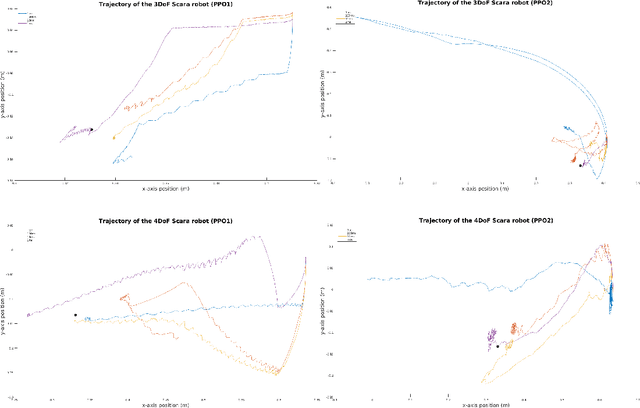
We propose a novel framework for Deep Reinforcement Learning (DRL) in modular robotics using traditional robotic tools that extend state-of-the-art DRL implementations and provide an end-to-end approach which trains a robot directly from joint states. Moreover, we present a novel technique to transfer these DLR methods into the real robot, aiming to close the simulation-reality gap. We demonstrate the robustness of the performance of state-of-the-art DRL methods for continuous action spaces in modular robots, with an empirical study both in simulation and in the real robot where we also evaluate how accelerating the simulation time affects the robot's performance. Our results show that extending the modular robot from 3 degrees-of-freedom (DoF), to 4 DoF, does not affect the robot's learning. This paves the way towards training modular robots using DRL techniques.
Dissecting Robotics - historical overview and future perspectives
Apr 27, 2017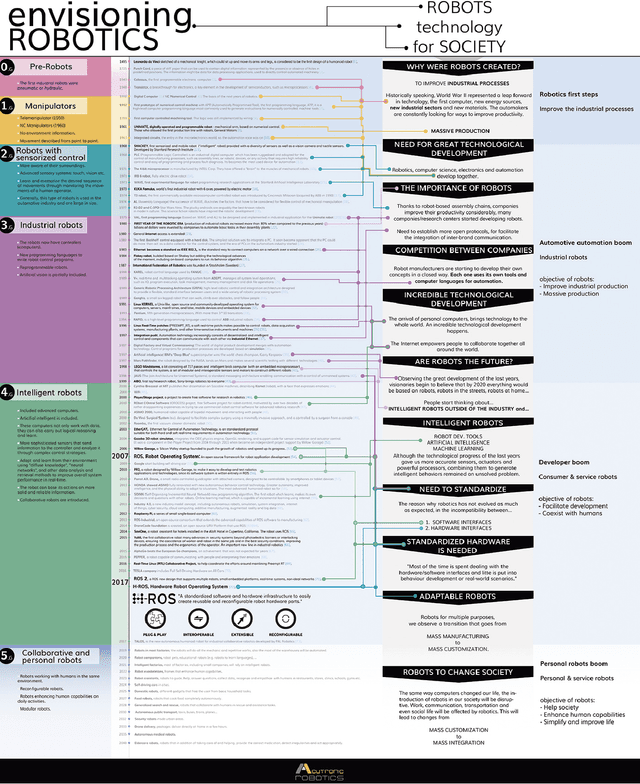
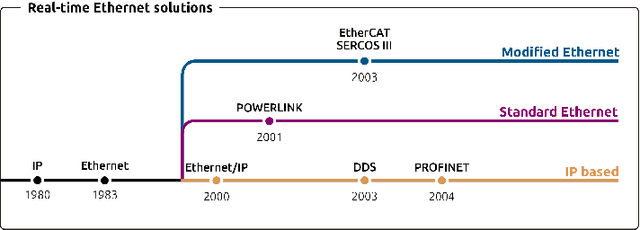

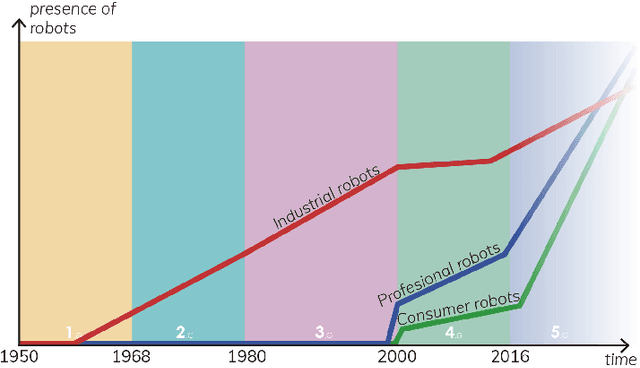
Robotics is called to be the next technological revolution and estimations indicate that it will trigger the fourth industrial revolution. This article presents a review of some of the most relevant milestones that occurred in robotics over the last few decades and future perspectives. Despite the fact that, nowadays, robotics is an emerging field, the challenges in many technological aspects and more importantly bringing innovative solutions to the market still remain open. The need of reducing the integration time, costs and a common hardware infrastructure are discussed and further analysed in this work. We conclude with a discussion of the future perspectives of robotics as an engineering discipline and with suggestions for future research directions.