Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards self-adaptable robots: from programming to training machines
Paper and Code
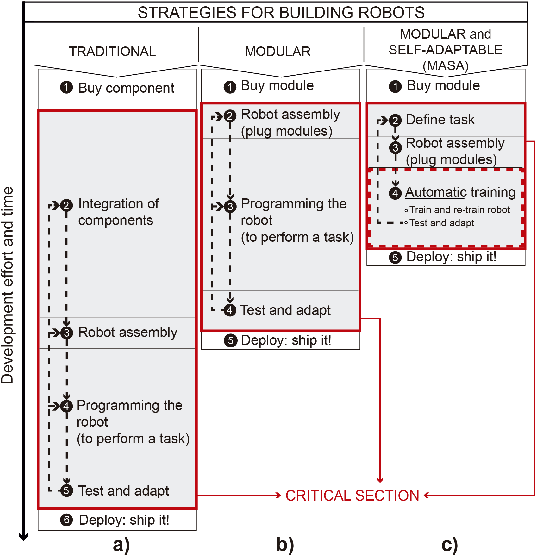
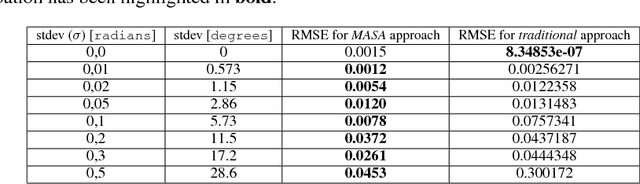
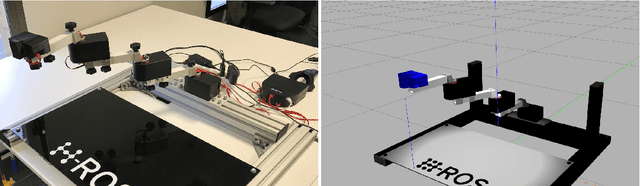
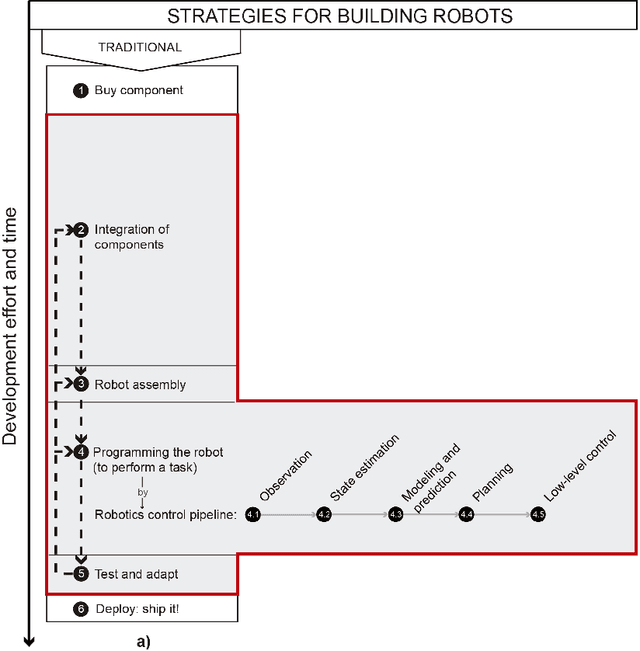
We argue that hardware modularity plays a key role in the convergence of Robotics and Artificial Intelligence (AI). We introduce a new approach for building robots that leads to more adaptable and capable machines. We present the concept of a self-adaptable robot that makes use of hardware modularity and AI techniques to reduce the effort and time required to be built. We demonstrate in simulation and with a real robot how, rather than programming, training produces behaviors in the robot that generalize fast and produce robust outputs in the presence of noise. In particular, we advocate for mammals.
View paper on