 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Learning for Modular Robots
Paper and Code
Feb 12, 2018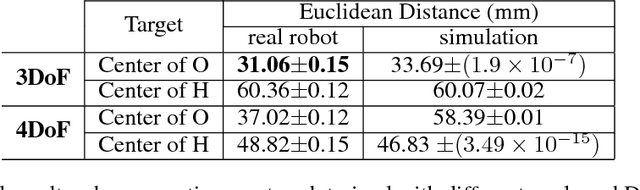
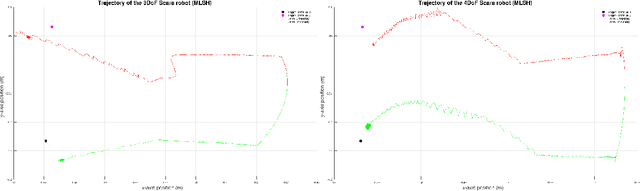
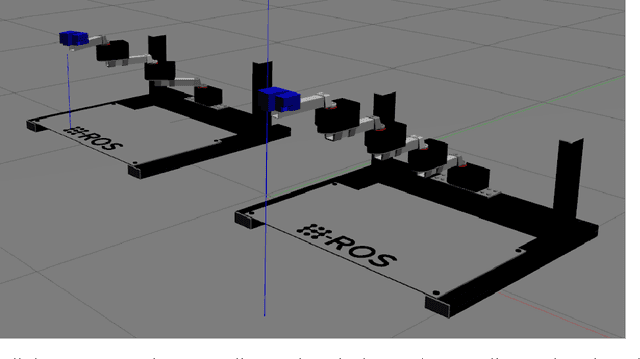
We argue that hierarchical methods can become the key for modular robots achieving reconfigurability. We present a hierarchical approach for modular robots that allows a robot to simultaneously learn multiple tasks. Our evaluation results present an environment composed of two different modular robot configurations, namely 3 degrees-of-freedom (DoF) and 4DoF with two corresponding targets. During the training, we switch between configurations and targets aiming to evaluate the possibility of training a neural network that is able to select appropriate motor primitives and robot configuration to achieve the target. The trained neural network is then transferred and executed on a real robot with 3DoF and 4DoF configurations. We demonstrate how this technique generalizes to robots with different configurations and tasks.