 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnconstrained Matching of 2D and 3D Descriptors for 6-DOF Pose Estimation
May 29, 2020



This paper proposes a novel concept to directly match feature descriptors extracted from 2D images with feature descriptors extracted from 3D point clouds. We use this concept to directly localize images in a 3D point cloud. We generate a dataset of matching 2D and 3D points and their corresponding feature descriptors, which is used to learn a Descriptor-Matcher classifier. To localize the pose of an image at test time, we extract keypoints and feature descriptors from the query image. The trained Descriptor-Matcher is then used to match the features from the image and the point cloud. The locations of the matched features are used in a robust pose estimation algorithm to predict the location and orientation of the query image. We carried out an extensive evaluation of the proposed method for indoor and outdoor scenarios and with different types of point clouds to verify the feasibility of our approach. Experimental results demonstrate that direct matching of feature descriptors from images and point clouds is not only a viable idea but can also be reliably used to estimate the 6-DOF poses of query cameras in any type of 3D point cloud in an unconstrained manner with high precision.
Direct Image to Point Cloud Descriptors Matching for 6-DOF Camera Localization in Dense 3D Point Cloud
Jun 14, 2019
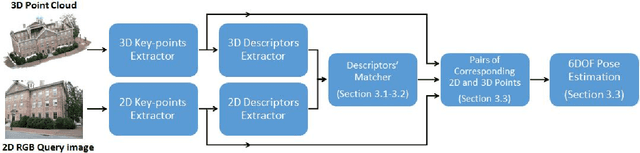

We propose a novel concept to directly match feature descriptors extracted from RGB images, with feature descriptors extracted from 3D point clouds. We use this concept to localize the position and orientation (pose) of the camera of a query image in dense point clouds. We generate a dataset of matching 2D and 3D descriptors, and use it to train a proposed Descriptor-Matcher algorithm. To localize a query image in a point cloud, we extract 2D keypoints and descriptors from the query image. Then the Descriptor-Matcher is used to find the corresponding pairs 2D and 3D keypoints by matching the 2D descriptors with the pre-extracted 3D descriptors of the point cloud. This information is used in a robust pose estimation algorithm to localize the query image in the 3D point cloud. Experiments demonstrate that directly matching 2D and 3D descriptors is not only a viable idea but also achieves competitive accuracy compared to other state-of-the-art approaches for camera pose localization.
Image Set Classification for Low Resolution Surveillance
Mar 26, 2018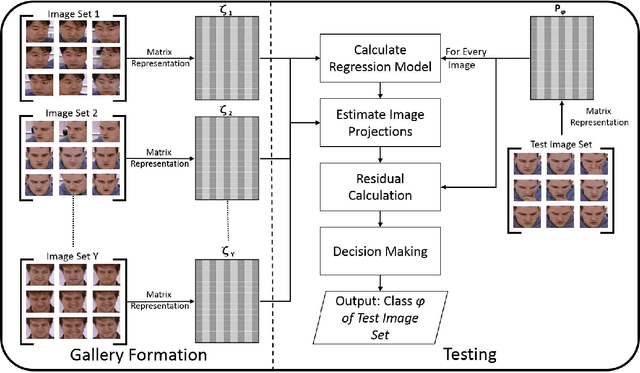

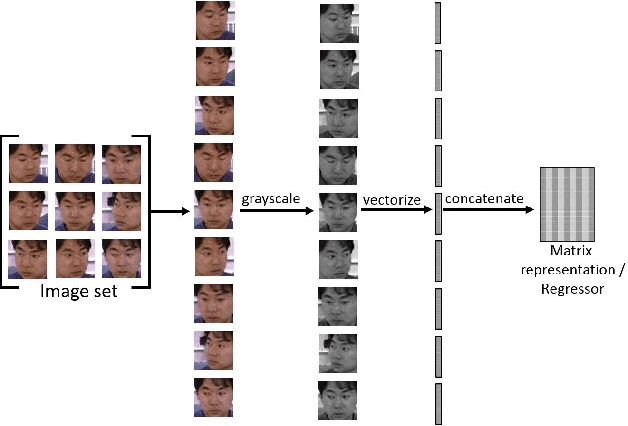

This paper proposes a novel image set classification technique based on the concept of linear regression. Unlike most other approaches, the proposed technique does not involve any training or feature extraction. The gallery image sets are represented as subspaces in a high dimensional space. Class specific gallery subspaces are used to estimate regression models for each image of the test image set. Images of the test set are then projected on the gallery subspaces. Residuals, calculated using the Euclidean distance between the original and the projected test images, are used as the distance metric. Three different strategies are devised to decide on the final class of the test image set. We performed extensive evaluations of the proposed technique under the challenges of low resolution, noise and less gallery data for the tasks of surveillance, video based face recognition and object recognition. Experiments show that the proposed technique achieves a better classification accuracy and a faster execution time under the challenging testing conditions.
Efficient Image Set Classification using Linear Regression based Image Reconstruction
Jan 10, 2017

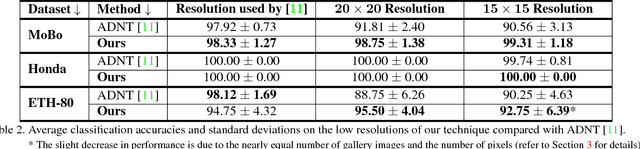

We propose a novel image set classification technique using linear regression models. Downsampled gallery image sets are interpreted as subspaces of a high dimensional space to avoid the computationally expensive training step. We estimate regression models for each test image using the class specific gallery subspaces. Images of the test set are then reconstructed using the regression models. Based on the minimum reconstruction error between the reconstructed and the original images, a weighted voting strategy is used to classify the test set. We performed extensive evaluation on the benchmark UCSD/Honda, CMU Mobo and YouTube Celebrity datasets for face classification, and ETH-80 dataset for object classification. The results demonstrate that by using only a small amount of training data, our technique achieved competitive classification accuracy and superior computational speed compared with the state-of-the-art methods.