 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuaMo: Quaternion Motions for Vision-based 3D Human Kinematics Capture
Jan 27, 2026Vision-based 3D human motion capture from videos remains a challenge in computer vision. Traditional 3D pose estimation approaches often ignore the temporal consistency between frames, causing implausible and jittery motion. The emerging field of kinematics-based 3D motion capture addresses these issues by estimating the temporal transitioning between poses instead. A major drawback in current kinematics approaches is their reliance on Euler angles. Despite their simplicity, Euler angles suffer from discontinuity that leads to unstable motion reconstructions, especially in online settings where trajectory refinement is unavailable. Contrarily, quaternions have no discontinuity and can produce continuous transitions between poses. In this paper, we propose QuaMo, a novel Quaternion Motions method using quaternion differential equations (QDE) for human kinematics capture. We utilize the state-space model, an effective system for describing real-time kinematics estimations, with quaternion state and the QDE describing quaternion velocity. The corresponding angular acceleration is computed from a meta-PD controller with a novel acceleration enhancement that adaptively regulates the control signals as the human quickly changes to a new pose. Unlike previous work, our QDE is solved under the quaternion unit-sphere constraint that results in more accurate estimations. Experimental results show that our novel formulation of the QDE with acceleration enhancement accurately estimates 3D human kinematics with no discontinuity and minimal implausibilities. QuaMo outperforms comparable state-of-the-art methods on multiple datasets, namely Human3.6M, Fit3D, SportsPose and AIST. The code is available at https://github.com/cuongle1206/QuaMo
On the Role of Rotation Equivariance in Monocular 3D Human Pose Estimation
Jan 20, 2026Estimating 3D from 2D is one of the central tasks in computer vision. In this work, we consider the monocular setting, i.e. single-view input, for 3D human pose estimation (HPE). Here, the task is to predict a 3D point set of human skeletal joints from a single 2D input image. While by definition this is an ill-posed problem, recent work has presented methods that solve it with up to several-centimetre error. Typically, these methods employ a two-step approach, where the first step is to detect the 2D skeletal joints in the input image, followed by the step of 2D-to-3D lifting. We find that common lifting models fail when encountering a rotated input. We argue that learning a single human pose along with its in-plane rotations is considerably easier and more geometrically grounded than directly learning a point-to-point mapping. Furthermore, our intuition is that endowing the model with the notion of rotation equivariance without explicitly constraining its parameter space should lead to a more straightforward learning process than one with equivariance by design. Utilising the common HPE benchmarks, we confirm that the 2D rotation equivariance per se improves the model performance on human poses akin to rotations in the image plane, and can be efficiently and straightforwardly learned by augmentation, outperforming state-of-the-art equivariant-by-design methods.
Robust Multi-view Camera Calibration from Dense Matches
Dec 17, 2025

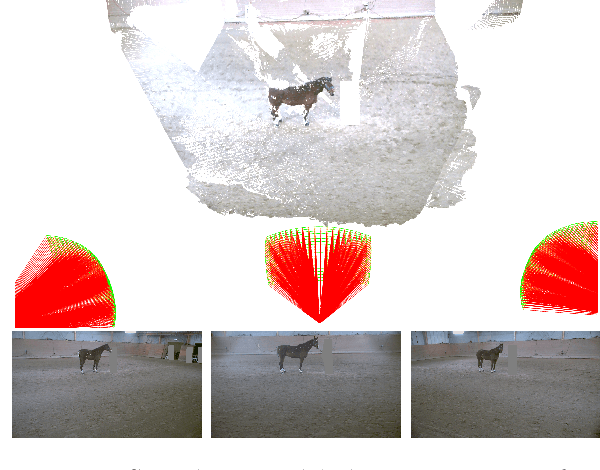

Estimating camera intrinsics and extrinsics is a fundamental problem in computer vision, and while advances in structure-from-motion (SfM) have improved accuracy and robustness, open challenges remain. In this paper, we introduce a robust method for pose estimation and calibration. We consider a set of rigid cameras, each observing the scene from a different perspective, which is a typical camera setup in animal behavior studies and forensic analysis of surveillance footage. Specifically, we analyse the individual components in a structure-from-motion (SfM) pipeline, and identify design choices that improve accuracy. Our main contributions are: (1) we investigate how to best subsample the predicted correspondences from a dense matcher to leverage them in the estimation process. (2) We investigate selection criteria for how to add the views incrementally. In a rigorous quantitative evaluation, we show the effectiveness of our changes, especially for cameras with strong radial distortion (79.9% ours vs. 40.4 vanilla VGGT). Finally, we demonstrate our correspondence subsampling in a global SfM setting where we initialize the poses using VGGT. The proposed pipeline generalizes across a wide range of camera setups, and could thus become a useful tool for animal behavior and forensic analysis.
Towards Texture- And Shape-Independent 3D Keypoint Estimation in Birds
May 22, 2025In this paper, we present a texture-independent approach to estimate and track 3D joint positions of multiple pigeons. For this purpose, we build upon the existing 3D-MuPPET framework, which estimates and tracks the 3D poses of up to 10 pigeons using a multi-view camera setup. We extend this framework by using a segmentation method that generates silhouettes of the individuals, which are then used to estimate 2D keypoints. Following 3D-MuPPET, these 2D keypoints are triangulated to infer 3D poses, and identities are matched in the first frame and tracked in 2D across subsequent frames. Our proposed texture-independent approach achieves comparable accuracy to the original texture-dependent 3D-MuPPET framework. Additionally, we explore our approach's applicability to other bird species. To do that, we infer the 2D joint positions of four bird species without additional fine-tuning the model trained on pigeons and obtain preliminary promising results. Thus, we think that our approach serves as a solid foundation and inspires the development of more robust and accurate texture-independent pose estimation frameworks.
Towards Application-Specific Evaluation of Vision Models: Case Studies in Ecology and Biology
May 05, 2025Computer vision methods have demonstrated considerable potential to streamline ecological and biological workflows, with a growing number of datasets and models becoming available to the research community. However, these resources focus predominantly on evaluation using machine learning metrics, with relatively little emphasis on how their application impacts downstream analysis. We argue that models should be evaluated using application-specific metrics that directly represent model performance in the context of its final use case. To support this argument, we present two disparate case studies: (1) estimating chimpanzee abundance and density with camera trap distance sampling when using a video-based behaviour classifier and (2) estimating head rotation in pigeons using a 3D posture estimator. We show that even models with strong machine learning performance (e.g., 87% mAP) can yield data that leads to discrepancies in abundance estimates compared to expert-derived data. Similarly, the highest-performing models for posture estimation do not produce the most accurate inferences of gaze direction in pigeons. Motivated by these findings, we call for researchers to integrate application-specific metrics in ecological/biological datasets, allowing for models to be benchmarked in the context of their downstream application and to facilitate better integration of models into application workflows.
Neural Texture Puppeteer: A Framework for Neural Geometry and Texture Rendering of Articulated Shapes, Enabling Re-Identification at Interactive Speed
Nov 28, 2023In this paper, we present a neural rendering pipeline for textured articulated shapes that we call Neural Texture Puppeteer. Our method separates geometry and texture encoding. The geometry pipeline learns to capture spatial relationships on the surface of the articulated shape from ground truth data that provides this geometric information. A texture auto-encoder makes use of this information to encode textured images into a global latent code. This global texture embedding can be efficiently trained separately from the geometry, and used in a downstream task to identify individuals. The neural texture rendering and the identification of individuals run at interactive speeds. To the best of our knowledge, we are the first to offer a promising alternative to CNN- or transformer-based approaches for re-identification of articulated individuals based on neural rendering. Realistic looking novel view and pose synthesis for different synthetic cow textures further demonstrate the quality of our method. Restricted by the availability of ground truth data for the articulated shape's geometry, the quality for real-world data synthesis is reduced. We further demonstrate the flexibility of our model for real-world data by applying a synthetic to real-world texture domain shift where we reconstruct the texture from a real-world 2D RGB image. Thus, our method can be applied to endangered species where data is limited. Our novel synthetic texture dataset NePuMoo is publicly available to inspire further development in the field of neural rendering-based re-identification.
3D-MuPPET: 3D Multi-Pigeon Pose Estimation and Tracking
Aug 29, 2023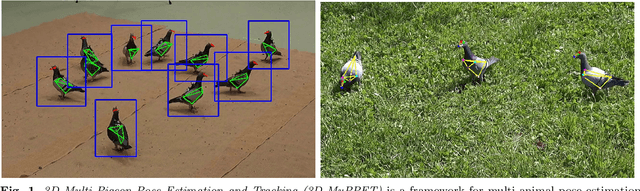
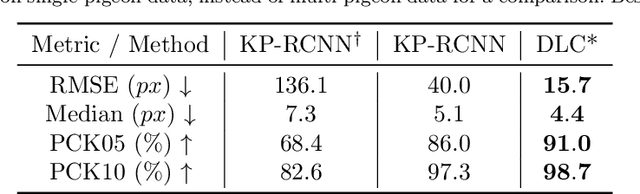
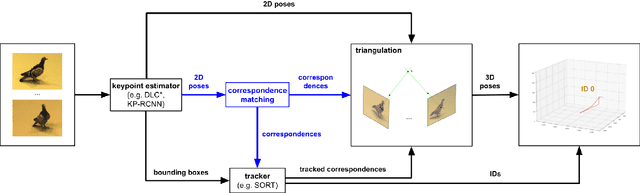

Markerless methods for animal posture tracking have been developing recently, but frameworks and benchmarks for tracking large animal groups in 3D are still lacking. To overcome this gap in the literature, we present 3D-MuPPET, a framework to estimate and track 3D poses of up to 10 pigeons at interactive speed using multiple-views. We train a pose estimator to infer 2D keypoints and bounding boxes of multiple pigeons, then triangulate the keypoints to 3D. For correspondence matching, we first dynamically match 2D detections to global identities in the first frame, then use a 2D tracker to maintain correspondences accross views in subsequent frames. We achieve comparable accuracy to a state of the art 3D pose estimator for Root Mean Square Error (RMSE) and Percentage of Correct Keypoints (PCK). We also showcase a novel use case where our model trained with data of single pigeons provides comparable results on data containing multiple pigeons. This can simplify the domain shift to new species because annotating single animal data is less labour intensive than multi-animal data. Additionally, we benchmark the inference speed of 3D-MuPPET, with up to 10 fps in 2D and 1.5 fps in 3D, and perform quantitative tracking evaluation, which yields encouraging results. Finally, we show that 3D-MuPPET also works in natural environments without model fine-tuning on additional annotations. To the best of our knowledge we are the first to present a framework for 2D/3D posture and trajectory tracking that works in both indoor and outdoor environments.