 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Approach During the Short-loading Cycle Using Reinforcement Learning
Jun 19, 2024The short-loading cycle is a repetitive task performed in high quantities, making it a great alternative for automation. In the short-loading cycle, an expert operator navigates towards a pile, fills the bucket with material, navigates to a dump truck, and dumps the material into the tipping body. The operator has to balance the productivity goal while minimising the fuel usage, to maximise the overall efficiency of the cycle. In addition, difficult interactions, such as the tyre-to-surface interaction further complicate the cycle. These types of hard-to-model interactions that can be difficult to address with rule-based systems, together with the efficiency requirements, motivate us to examine the potential of data-driven approaches. In this paper, the possibility of teaching an agent through reinforcement learning to approach a dump truck's tipping body and get in position to dump material in the tipping body is examined. The agent is trained in a 3D simulated environment to perform a simplified navigation task. The trained agent is directly transferred to a real vehicle, to perform the same task, with no additional training. The results indicate that the agent can successfully learn to navigate towards the dump truck with a limited amount of control signals in simulation and when transferred to a real vehicle, exhibits the correct behaviour.
Integration of Neuromorphic AI in Event-Driven Distributed Digitized Systems: Concepts and Research Directions
Oct 20, 2022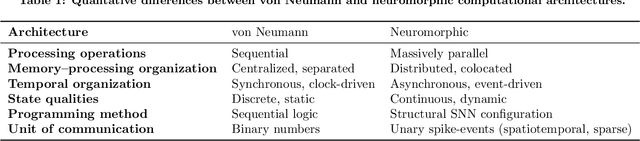
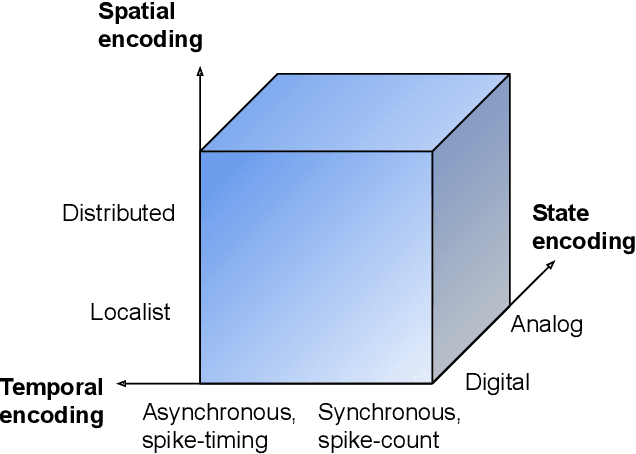
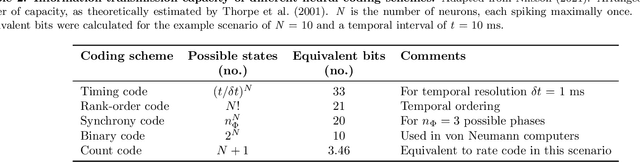
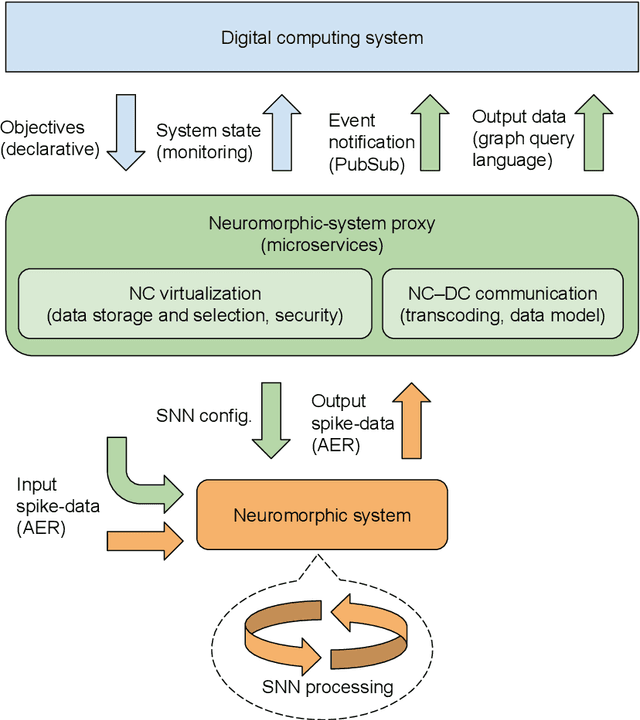
Increasing complexity and data-generation rates in cyber-physical systems and the industrial Internet of things are calling for a corresponding increase in AI capabilities at the resource-constrained edges of the Internet. Meanwhile, the resource requirements of digital computing and deep learning are growing exponentially, in an unsustainable manner. One possible way to bridge this gap is the adoption of resource-efficient brain-inspired "neuromorphic" processing and sensing devices, which use event-driven, asynchronous, dynamic neurosynaptic elements with colocated memory for distributed processing and machine learning. However, since neuromorphic systems are fundamentally different from conventional von Neumann computers and clock-driven sensor systems, several challenges are posed to large-scale adoption and integration of neuromorphic devices into the existing distributed digital-computational infrastructure. Here, we describe the current landscape of neuromorphic computing, focusing on characteristics that pose integration challenges. Based on this analysis, we propose a microservice-based framework for neuromorphic systems integration, consisting of a neuromorphic-system proxy, which provides virtualization and communication capabilities required in distributed systems of systems, in combination with a declarative programming approach offering engineering-process abstraction. We also present concepts that could serve as a basis for the realization of this framework, and identify directions for further research required to enable large-scale system integration of neuromorphic devices.