 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-shot Class-incremental Learning for 3D Point Cloud Objects
May 30, 2022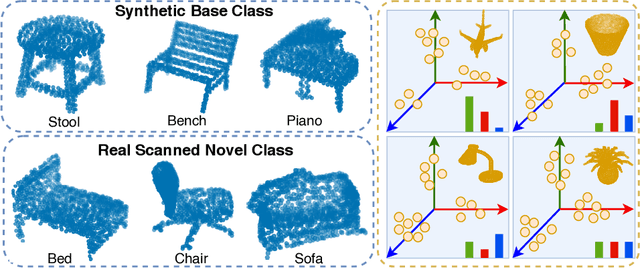
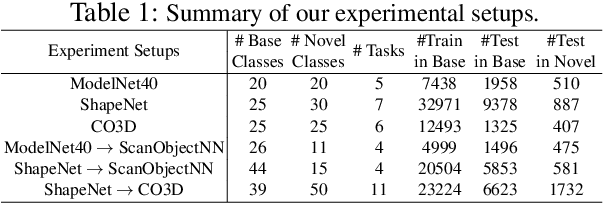

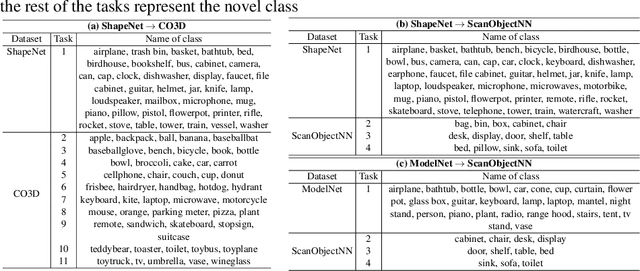
Few-shot class-incremental learning (FSCIL) aims to incrementally fine-tune a model trained on base classes for a novel set of classes using a few examples without forgetting the previous training. Recent efforts of FSCIL address this problem primarily on 2D image data. However, due to the advancement of camera technology, 3D point cloud data has become more available than ever, which warrants considering FSCIL on 3D data. In this paper, we address FSCIL in the 3D domain. In addition to well-known problems of catastrophic forgetting of past knowledge and overfitting of few-shot data, 3D FSCIL can bring newer challenges. For example, base classes may contain many synthetic instances in a realistic scenario. In contrast, only a few real-scanned samples (from RGBD sensors) of novel classes are available in incremental steps. Due to the data variation from synthetic to real, FSCIL endures additional challenges, degrading performance in later incremental steps. We attempt to solve this problem by using Microshapes (orthogonal basis vectors) describing any 3D objects using a pre-defined set of rules. It supports incremental training with few-shot examples minimizing synthetic to real data variation. We propose new test protocols for 3D FSCIL using popular synthetic datasets, ModelNet and ShapeNet, and 3D real-scanned datasets, ScanObjectNN, and Common Objects in 3D (CO3D). By comparing state-of-the-art methods, we establish the effectiveness of our approach in the 3D domain.
Learning without Forgetting for 3D Point Cloud Objects
Jun 27, 2021

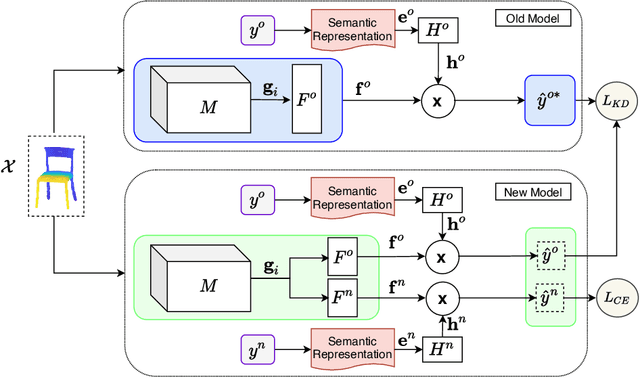

When we fine-tune a well-trained deep learning model for a new set of classes, the network learns new concepts but gradually forgets the knowledge of old training. In some real-life applications, we may be interested in learning new classes without forgetting the capability of previous experience. Such learning without forgetting problem is often investigated using 2D image recognition tasks. In this paper, considering the growth of depth camera technology, we address the same problem for the 3D point cloud object data. This problem becomes more challenging in the 3D domain than 2D because of the unavailability of large datasets and powerful pretrained backbone models. We investigate knowledge distillation techniques on 3D data to reduce catastrophic forgetting of the previous training. Moreover, we improve the distillation process by using semantic word vectors of object classes. We observe that exploring the interrelation of old and new knowledge during training helps to learn new concepts without forgetting old ones. Experimenting on three 3D point cloud recognition backbones (PointNet, DGCNN, and PointConv) and synthetic (ModelNet40, ModelNet10) and real scanned (ScanObjectNN) datasets, we establish new baseline results on learning without forgetting for 3D data. This research will instigate many future works in this area.