 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Monocular Depth Estimation of Untextured Indoor Rotated Scenes
Jun 25, 2021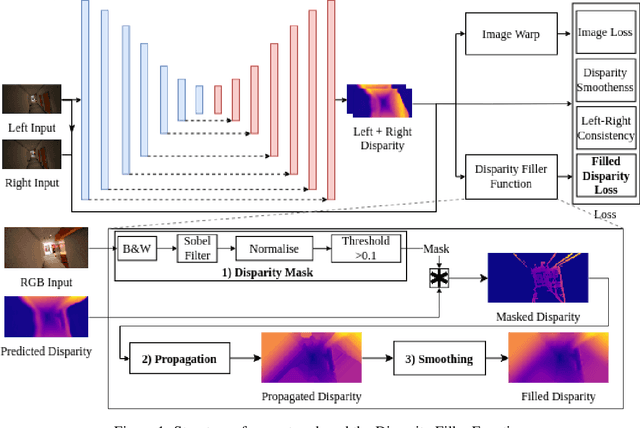


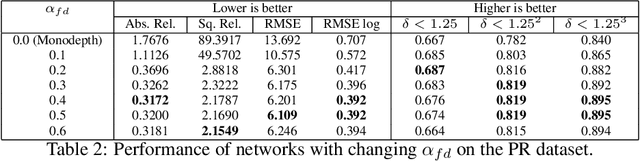
Self-supervised deep learning methods have leveraged stereo images for training monocular depth estimation. Although these methods show strong results on outdoor datasets such as KITTI, they do not match performance of supervised methods on indoor environments with camera rotation. Indoor, rotated scenes are common for less constrained applications and pose problems for two reasons: abundance of low texture regions and increased complexity of depth cues for images under rotation. In an effort to extend self-supervised learning to more generalised environments we propose two additions. First, we propose a novel Filled Disparity Loss term that corrects for ambiguity of image reconstruction error loss in textureless regions. Specifically, we interpolate disparity in untextured regions, using the estimated disparity from surrounding textured areas, and use L1 loss to correct the original estimation. Our experiments show that depth estimation is substantially improved on low-texture scenes, without any loss on textured scenes, when compared to Monodepth by Godard et al. Secondly, we show that training with an application's representative rotations, in both pitch and roll, is sufficient to significantly improve performance over the entire range of expected rotation. We demonstrate that depth estimation is successfully generalised as performance is not lost when evaluated on test sets with no camera rotation. Together these developments enable a broader use of self-supervised learning of monocular depth estimation for complex environments.
How do neural networks see depth in single images?
May 16, 2019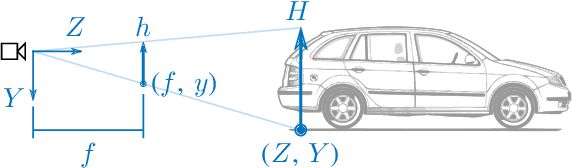
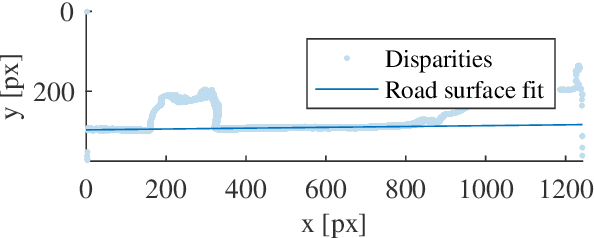
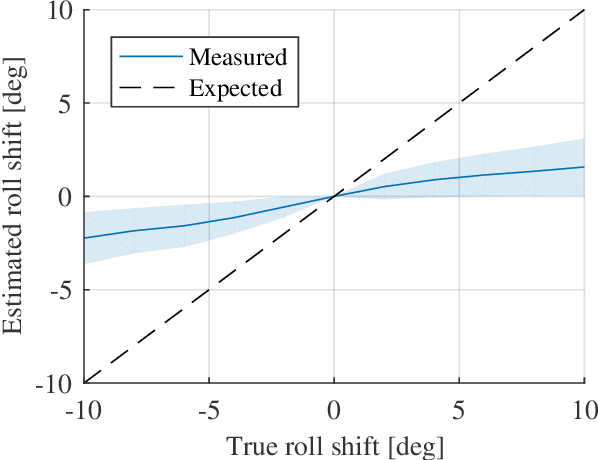
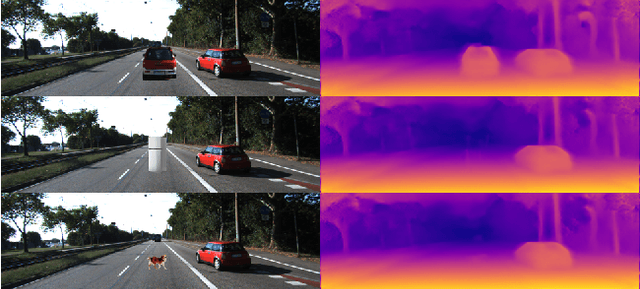
Deep neural networks have lead to a breakthrough in depth estimation from single images. Recent work often focuses on the accuracy of the depth map, where an evaluation on a publicly available test set such as the KITTI vision benchmark is often the main result of the article. While such an evaluation shows how well neural networks can estimate depth, it does not show how they do this. To the best of our knowledge, no work currently exists that analyzes what these networks have learned. In this work we take the MonoDepth network by Godard et al. and investigate what visual cues it exploits for depth estimation. We find that the network ignores the apparent size of known obstacles in favor of their vertical position in the image. Using the vertical position requires the camera pose to be known; however we find that MonoDepth only partially corrects for changes in camera pitch and roll and that these influence the estimated depth towards obstacles. We further show that MonoDepth's use of the vertical image position allows it to estimate the distance towards arbitrary obstacles, even those not appearing in the training set, but that it requires a strong edge at the ground contact point of the object to do so. In future work we will investigate whether these observations also apply to other neural networks for monocular depth estimation.