 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaming Objects for Vision-and-Language Manipulation
Mar 06, 2023Robot manipulation tasks by natural language instructions need common understanding of the target object between human and the robot. However, the instructions often have an interpretation ambiguity, because the instruction lacks important information, or does not express the target object correctly to complete the task. To solve this ambiguity problem, we hypothesize that "naming" the target objects in advance will reduce the ambiguity of natural language instructions. We propose a robot system and method that incorporates naming with appearance of the objects in advance, so that in the later manipulation task, instruction can be performed with its unique name to disambiguate the objects easily. To demonstrate the effectiveness of our approach, we build a system that can memorize the target objects, and show that naming the objects facilitates detection of the target objects and improves the success rate of manipulation instructions. With this method, the success rate of object manipulation task increases by 31% in ambiguous instructions.
Dual Normalization Multitasking for Audio-Visual Sounding Object Localization
Jun 01, 2021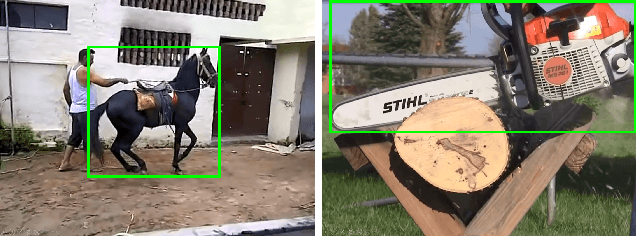
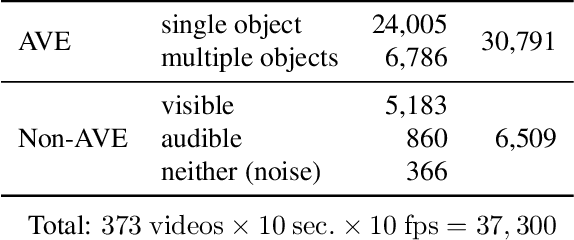
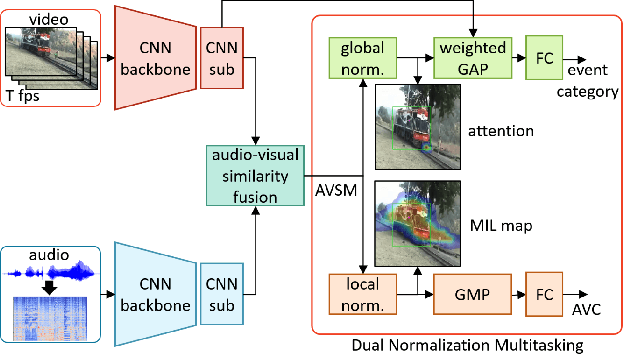

Although several research works have been reported on audio-visual sound source localization in unconstrained videos, no datasets and metrics have been proposed in the literature to quantitatively evaluate its performance. Defining the ground truth for sound source localization is difficult, because the location where the sound is produced is not limited to the range of the source object, but the vibrations propagate and spread through the surrounding objects. Therefore we propose a new concept, Sounding Object, to reduce the ambiguity of the visual location of sound, making it possible to annotate the location of the wide range of sound sources. With newly proposed metrics for quantitative evaluation, we formulate the problem of Audio-Visual Sounding Object Localization (AVSOL). We also created the evaluation dataset (AVSOL-E dataset) by manually annotating the test set of well-known Audio-Visual Event (AVE) dataset. To tackle this new AVSOL problem, we propose a novel multitask training strategy and architecture called Dual Normalization Multitasking (DNM), which aggregates the Audio-Visual Correspondence (AVC) task and the classification task for video events into a single audio-visual similarity map. By efficiently utilize both supervisions by DNM, our proposed architecture significantly outperforms the baseline methods.