 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep LG-Track: An Enhanced Localization-Confidence-Guided Multi-Object Tracker
Apr 02, 2025Multi-object tracking plays a crucial role in various applications, such as autonomous driving and security surveillance. This study introduces Deep LG-Track, a novel multi-object tracker that incorporates three key enhancements to improve the tracking accuracy and robustness. First, an adaptive Kalman filter is developed to dynamically update the covariance of measurement noise based on detection confidence and trajectory disappearance. Second, a novel cost matrix is formulated to adaptively fuse motion and appearance information, leveraging localization confidence and detection confidence as weighting factors. Third, a dynamic appearance feature updating strategy is introduced, adjusting the relative weighting of historical and current appearance features based on appearance clarity and localization accuracy. Comprehensive evaluations on the MOT17 and MOT20 datasets demonstrate that the proposed Deep LG-Track consistently outperforms state-of-the-art trackers across multiple performance metrics, highlighting its effectiveness in multi-object tracking tasks.
Localization-Guided Track: A Deep Association Multi-Object Tracking Framework Based on Localization Confidence of Detections
Sep 18, 2023



In currently available literature, no tracking-by-detection (TBD) paradigm-based tracking method has considered the localization confidence of detection boxes. In most TBD-based methods, it is considered that objects of low detection confidence are highly occluded and thus it is a normal practice to directly disregard such objects or to reduce their priority in matching. In addition, appearance similarity is not a factor to consider for matching these objects. However, in terms of the detection confidence fusing classification and localization, objects of low detection confidence may have inaccurate localization but clear appearance; similarly, objects of high detection confidence may have inaccurate localization or unclear appearance; yet these objects are not further classified. In view of these issues, we propose Localization-Guided Track (LG-Track). Firstly, localization confidence is applied in MOT for the first time, with appearance clarity and localization accuracy of detection boxes taken into account, and an effective deep association mechanism is designed; secondly, based on the classification confidence and localization confidence, a more appropriate cost matrix can be selected and used; finally, extensive experiments have been conducted on MOT17 and MOT20 datasets. The results show that our proposed method outperforms the compared state-of-art tracking methods. For the benefit of the community, our code has been made publicly at https://github.com/mengting2023/LG-Track.
You Only Need Two Detectors to Achieve Multi-Modal 3D Multi-Object Tracking
Apr 18, 2023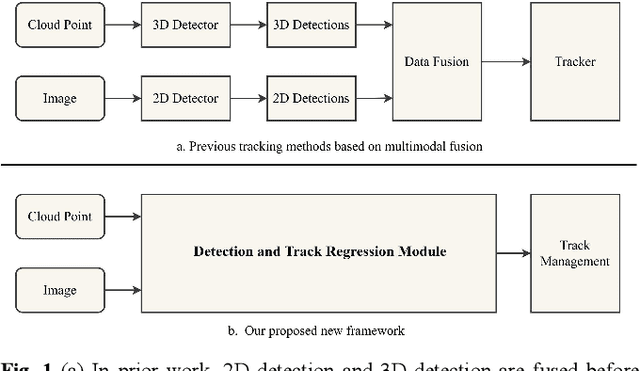
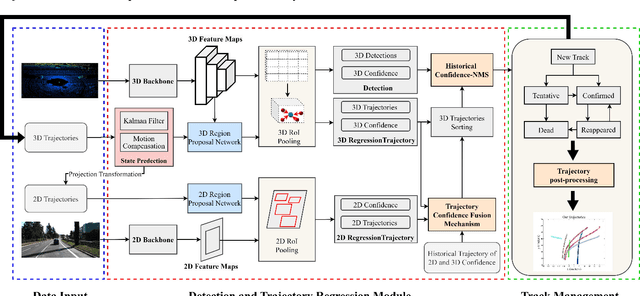
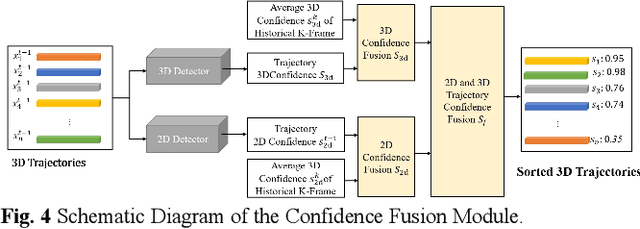
Firstly, a new multi-object tracking framework is proposed in this paper based on multi-modal fusion. By integrating object detection and multi-object tracking into the same model, this framework avoids the complex data association process in the classical TBD paradigm, and requires no additional training. Secondly, confidence of historical trajectory regression is explored, possible states of a trajectory in the current frame (weak object or strong object) are analyzed and a confidence fusion module is designed to guide non-maximum suppression of trajectory and detection for ordered association. Finally, extensive experiments are conducted on the KITTI and Waymo datasets. The results show that the proposed method can achieve robust tracking by using only two modal detectors and it is more accurate than many of the latest TBD paradigm-based multi-modal tracking methods. The source codes of the proposed method are available at https://github.com/wangxiyang2022/YONTD-MOT