 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect initial orbit determination
Aug 28, 2023Initial orbit determination (IOD) is an important early step in the processing chain that makes sense of and reconciles the multiple optical observations of a resident space object. IOD methods generally operate on line-of-sight (LOS) vectors extracted from images of the object, hence the LOS vectors can be seen as discrete point samples of the raw optical measurements. Typically, the number of LOS vectors used by an IOD method is much smaller than the available measurements (\ie, the set of pixel intensity values), hence current IOD methods arguably under-utilize the rich information present in the data. In this paper, we propose a \emph{direct} IOD method called D-IOD that fits the orbital parameters directly on the observed streak images, without requiring LOS extraction. Since it does not utilize LOS vectors, D-IOD avoids potential inaccuracies or errors due to an imperfect LOS extraction step. Two innovations underpin our novel orbit-fitting paradigm: first, we introduce a novel non-linear least-squares objective function that computes the loss between the candidate-orbit-generated streak images and the observed streak images. Second, the objective function is minimized with a gradient descent approach that is embedded in our proposed optimization strategies designed for streak images. We demonstrate the effectiveness of D-IOD on a variety of simulated scenarios and challenging real streak images.
Effective Utilisation of Multiple Open-Source Datasets to Improve Generalisation Performance of Point Cloud Segmentation Models
Nov 29, 2022

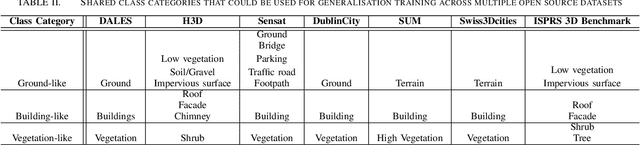

Semantic segmentation of aerial point cloud data can be utilised to differentiate which points belong to classes such as ground, buildings, or vegetation. Point clouds generated from aerial sensors mounted to drones or planes can utilise LIDAR sensors or cameras along with photogrammetry. Each method of data collection contains unique characteristics which can be learnt independently with state-of-the-art point cloud segmentation models. Utilising a single point cloud segmentation model can be desirable in situations where point cloud sensors, quality, and structures can change. In these situations it is desirable that the segmentation model can handle these variations with predictable and consistent results. Although deep learning can segment point clouds accurately it often suffers in generalisation, adapting poorly to data which is different than the training data. To address this issue, we propose to utilise multiple available open source fully annotated datasets to train and test models that are better able to generalise. In this paper we discuss the combination of these datasets into a simple training set and challenging test set. Combining datasets allows us to evaluate generalisation performance on known variations in the point cloud data. We show that a naive combination of datasets produces a model with improved generalisation performance as expected. We go on to show that an improved sampling strategy which decreases sampling variations increases the generalisation performance substantially on top of this. Experiments to find which sample variations give this performance boost found that consistent densities are the most important.