 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Localization in Floor Plans Using a Room Layout Edge Extraction Network
Mar 05, 2019



Indoor localization is one of the crucial enablers for deployment of service robots. Although several successful techniques for indoor localization have been proposed in the past, the majority of them relies on maps generated based on data gathered with the same sensor modality that is used for localization. Typically, tedious labor by experts is needed to acquire this data, thus limiting the readiness of the system as well as its ease of installation for inexperienced operators. In this paper, we propose a memory and computationally efficient monocular camera-based localization system that allows a robot to estimate its pose given an architectural floor plan. Our method employs a convolutional neural network to predict room layout edges from a single camera image and estimates the robot pose using a particle filter that matches the extracted edges to the given floor plan. We evaluate our localization system with multiple real-world experiments and demonstrate that it has the robustness and accuracy required for reliable indoor navigation.
Learning a Local Feature Descriptor for 3D LiDAR Scans
Sep 20, 2018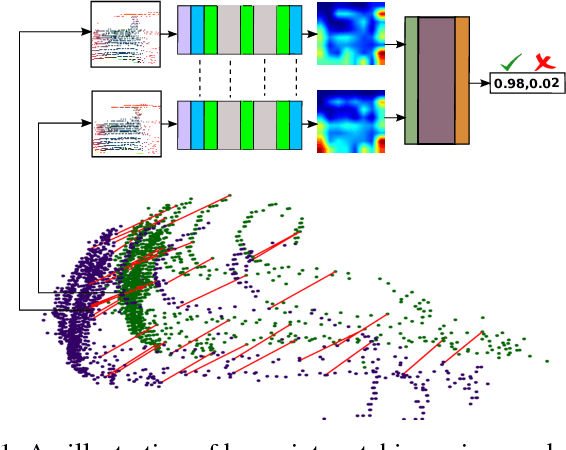
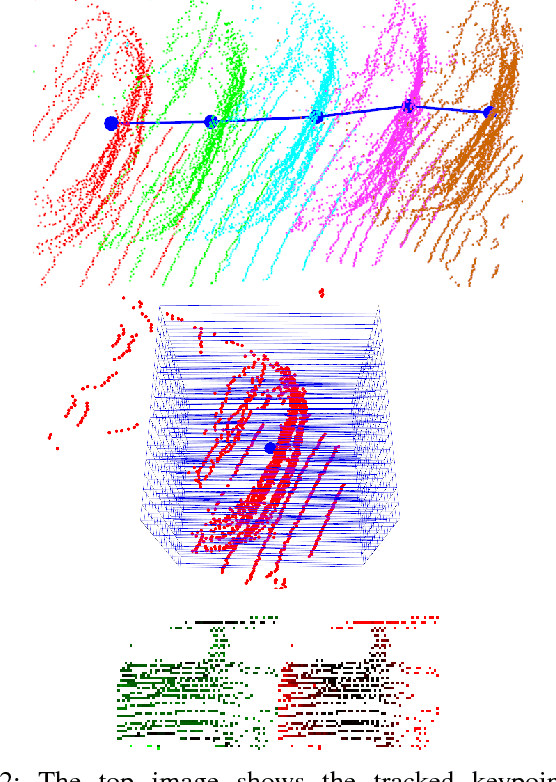
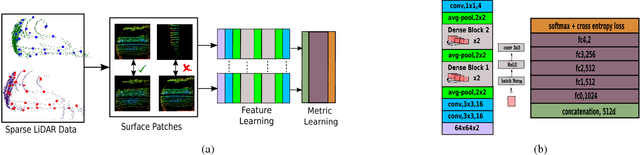
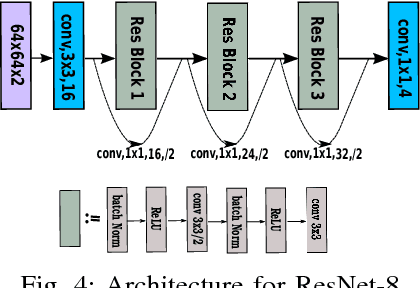
Robust data association is necessary for virtually every SLAM system and finding corresponding points is typically a preprocessing step for scan alignment algorithms. Traditionally, handcrafted feature descriptors were used for these problems but recently learned descriptors have been shown to perform more robustly. In this work, we propose a local feature descriptor for 3D LiDAR scans. The descriptor is learned using a Convolutional Neural Network (CNN). Our proposed architecture consists of a Siamese network for learning a feature descriptor and a metric learning network for matching the descriptors. We also present a method for estimating local surface patches and obtaining ground-truth correspondences. In extensive experiments, we compare our learned feature descriptor with existing 3D local descriptors and report highly competitive results for multiple experiments in terms of matching accuracy and computation time. \end{abstract}