 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepTemporalSeg: Temporally Consistent Semantic Segmentation of 3D LiDAR Scans
Jun 17, 2019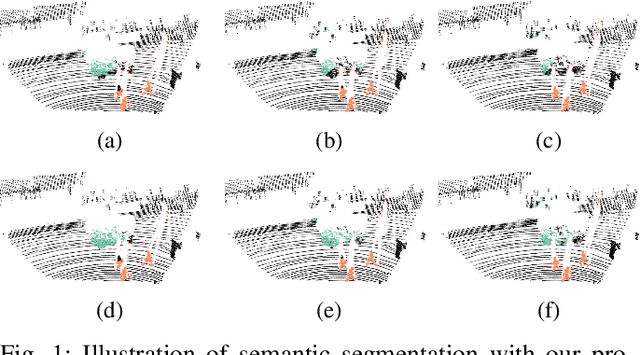
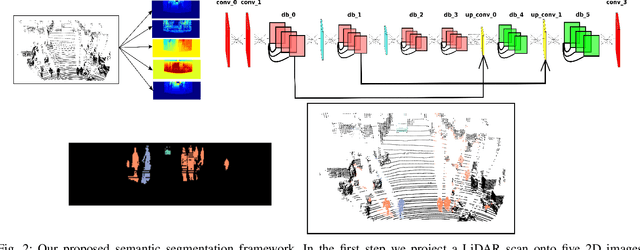
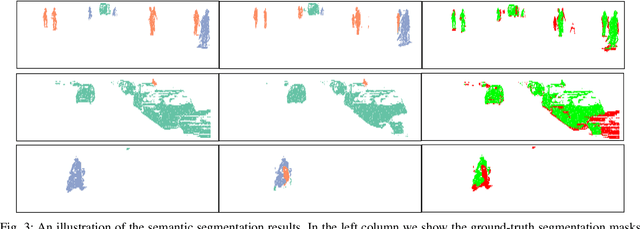
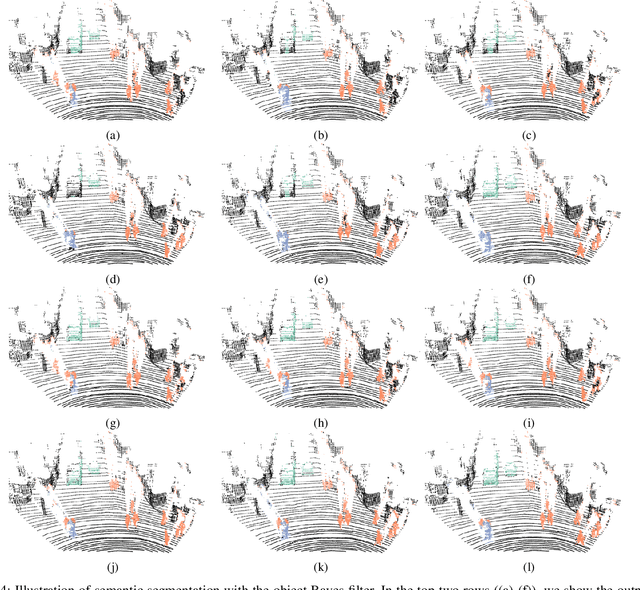
Understanding the semantic characteristics of the environment is a key enabler for autonomous robot operation. In this paper, we propose a deep convolutional neural network (DCNN) for the semantic segmentation of a LiDAR scan into the classes car, pedestrian or bicyclist. This architecture is based on dense blocks and efficiently utilizes depth separable convolutions to limit the number of parameters while still maintaining state-of-the-art performance. To make the predictions from the DCNN temporally consistent, we propose a Bayes filter based method. This method uses the predictions from the neural network to recursively estimate the current semantic state of a point in a scan. This recursive estimation uses the knowledge gained from previous scans, thereby making the predictions temporally consistent and robust towards isolated erroneous predictions. We compare the performance of our proposed architecture with other state-of-the-art neural network architectures and report substantial improvement. For the proposed Bayes filter approach, we show results on various sequences in the KITTI tracking benchmark.
Learning a Local Feature Descriptor for 3D LiDAR Scans
Sep 20, 2018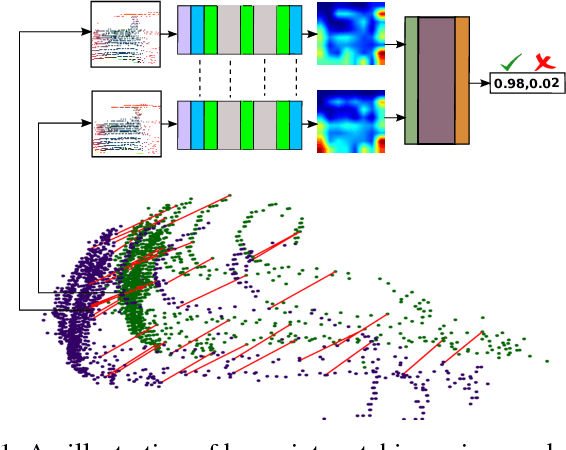
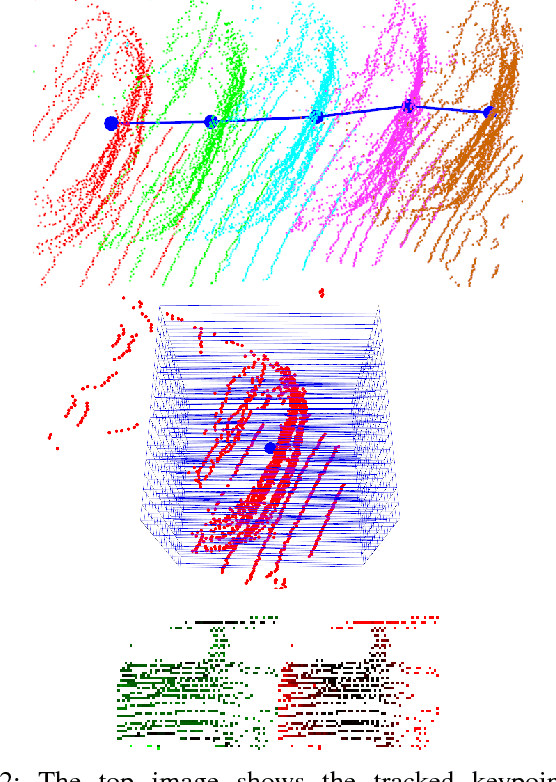
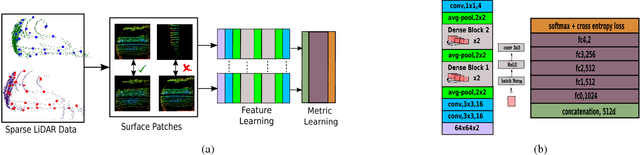
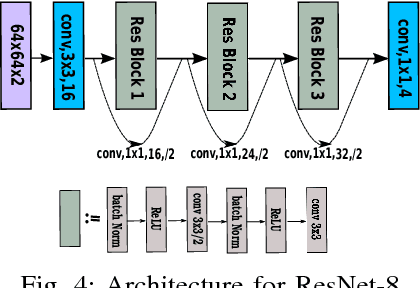
Robust data association is necessary for virtually every SLAM system and finding corresponding points is typically a preprocessing step for scan alignment algorithms. Traditionally, handcrafted feature descriptors were used for these problems but recently learned descriptors have been shown to perform more robustly. In this work, we propose a local feature descriptor for 3D LiDAR scans. The descriptor is learned using a Convolutional Neural Network (CNN). Our proposed architecture consists of a Siamese network for learning a feature descriptor and a metric learning network for matching the descriptors. We also present a method for estimating local surface patches and obtaining ground-truth correspondences. In extensive experiments, we compare our learned feature descriptor with existing 3D local descriptors and report highly competitive results for multiple experiments in terms of matching accuracy and computation time. \end{abstract}
Deep Semantic Classification for 3D LiDAR Data
Jun 26, 2017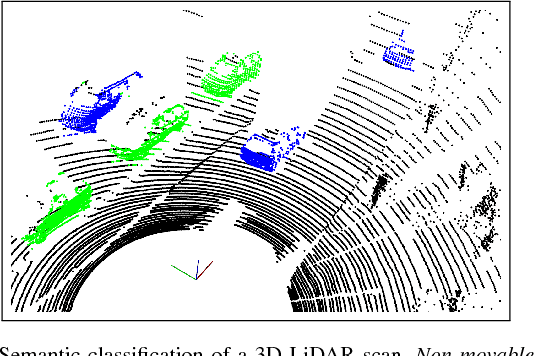
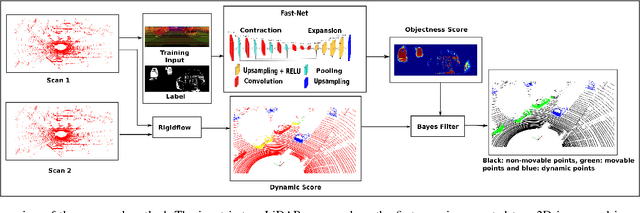
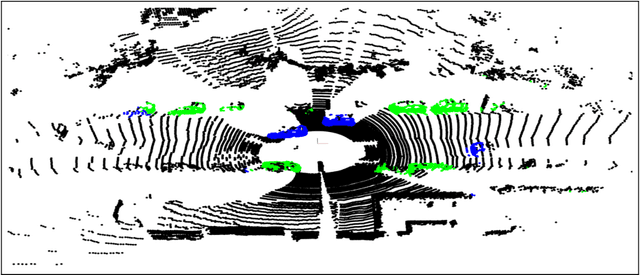
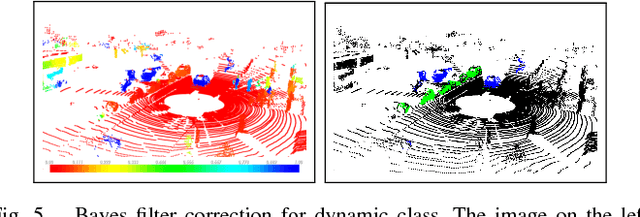
Robots are expected to operate autonomously in dynamic environments. Understanding the underlying dynamic characteristics of objects is a key enabler for achieving this goal. In this paper, we propose a method for pointwise semantic classification of 3D LiDAR data into three classes: non-movable, movable and dynamic. We concentrate on understanding these specific semantics because they characterize important information required for an autonomous system. Non-movable points in the scene belong to unchanging segments of the environment, whereas the remaining classes corresponds to the changing parts of the scene. The difference between the movable and dynamic class is their motion state. The dynamic points can be perceived as moving, whereas movable objects can move, but are perceived as static. To learn the distinction between movable and non-movable points in the environment, we introduce an approach based on deep neural network and for detecting the dynamic points, we estimate pointwise motion. We propose a Bayes filter framework for combining the learned semantic cues with the motion cues to infer the required semantic classification. In extensive experiments, we compare our approach with other methods on a standard benchmark dataset and report competitive results in comparison to the existing state-of-the-art. Furthermore, we show an improvement in the classification of points by combining the semantic cues retrieved from the neural network with the motion cues.