 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modal Object Tracking: Modality-Aware Representations and A Unified Benchmark
Nov 11, 2021In many visual systems, visual tracking often bases on RGB image sequences, in which some targets are invalid in low-light conditions, and tracking performance is thus affected significantly. Introducing other modalities such as depth and infrared data is an effective way to handle imaging limitations of individual sources, but multi-modal imaging platforms usually require elaborate designs and cannot be applied in many real-world applications at present. Near-infrared (NIR) imaging becomes an essential part of many surveillance cameras, whose imaging is switchable between RGB and NIR based on the light intensity. These two modalities are heterogeneous with very different visual properties and thus bring big challenges for visual tracking. However, existing works have not studied this challenging problem. In this work, we address the cross-modal object tracking problem and contribute a new video dataset, including 654 cross-modal image sequences with over 481K frames in total, and the average video length is more than 735 frames. To promote the research and development of cross-modal object tracking, we propose a new algorithm, which learns the modality-aware target representation to mitigate the appearance gap between RGB and NIR modalities in the tracking process. It is plug-and-play and could thus be flexibly embedded into different tracking frameworks. Extensive experiments on the dataset are conducted, and we demonstrate the effectiveness of the proposed algorithm in two representative tracking frameworks against 17 state-of-the-art tracking methods. We will release the dataset for free academic usage, dataset download link and code will be released soon.
Dynamic Local Regret for Non-convex Online Forecasting
Oct 25, 2019


We consider online forecasting problems for non-convex machine learning models. Forecasting introduces several challenges such as (i) frequent updates are necessary to deal with concept drift issues since the dynamics of the environment change over time, and (ii) the state of the art models are non-convex models. We address these challenges with a novel regret framework. Standard regret measures commonly do not consider both dynamic environment and non-convex models. We introduce a local regret for non-convex models in a dynamic environment. We present an update rule incurring a cost, according to our proposed local regret, which is sublinear in time T. Our update uses time-smoothed gradients. Using a real-world dataset we show that our time-smoothed approach yields several benefits when compared with state-of-the-art competitors: results are more stable against new data; training is more robust to hyperparameter selection; and our approach is more computationally efficient than the alternatives.
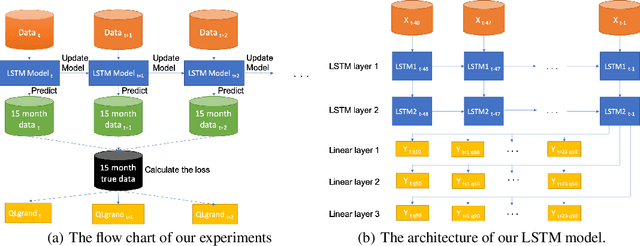
Time-Smoothed Gradients for Online Forecasting
May 21, 2019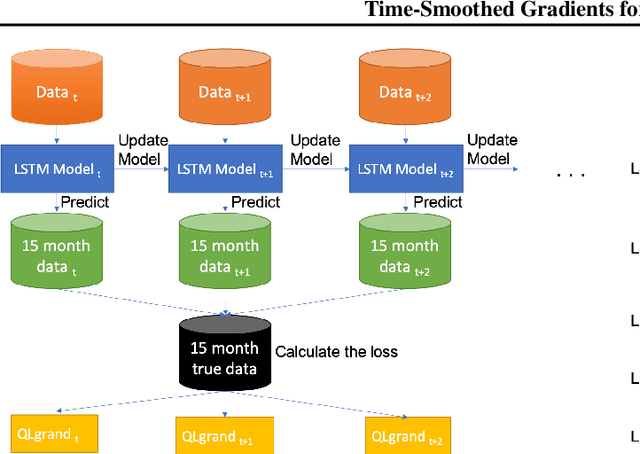
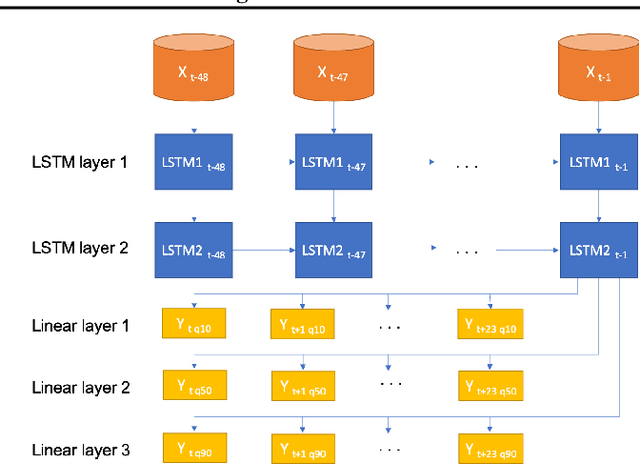

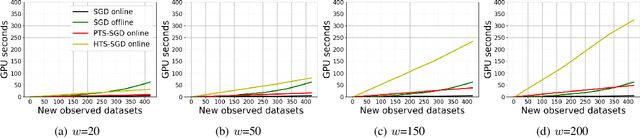
Here, we study different update rules in stochastic gradient descent (SGD) for online forecasting problems. The selection of the learning rate parameter is critical in SGD. However, it may not be feasible to tune this parameter in online learning. Therefore, it is necessary to have an update rule that is not sensitive to the selection of the learning parameter. Inspired by the local regret metric that we introduced previously, we propose to use time-smoothed gradients within SGD update. Using the public data set-- GEFCom2014, we validate that our approach yields more stable results than the other existing approaches. Furthermore, we show that such a simple approach is computationally efficient compared to the alternatives.