 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRIFT: Deep Restoration, ISP Fusion, and Tone-mapping
Apr 03, 2026Smartphone cameras have gained immense popularity with the adoption of high-resolution and high-dynamic range imaging. As a result, high-performance camera Image Signal Processors (ISPs) are crucial in generating high-quality images for the end user while keeping computational costs low. In this paper, we propose DRIFT (Deep Restoration, ISP Fusion, and Tone-mapping): an efficient AI mobile camera pipeline that generates high quality RGB images from hand-held raw captures. The first stage of DRIFT is a Multi-Frame Processing (MFP) network that is trained using a adversarial perceptual loss to perform multi-frame alignment, denoising, demosaicing, and super-resolution. Then, the output of DRIFT-MFP is processed by a novel deep-learning based tone-mapping (DRIFT-TM) solution that allows for tone tunability, ensures tone-consistency with a reference pipeline, and can be run efficiently for high-resolution images on a mobile device. We show qualitative and quantitative comparisons against state-of-the-art MFP and tone-mapping methods to demonstrate the effectiveness of our approach.
TRINIDI: Time-of-Flight Resonance Imaging with Neutrons for Isotopic Density Inferenc
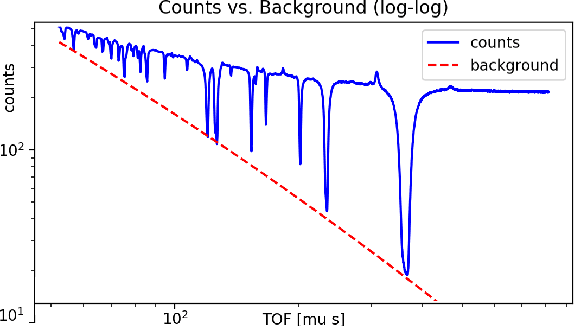
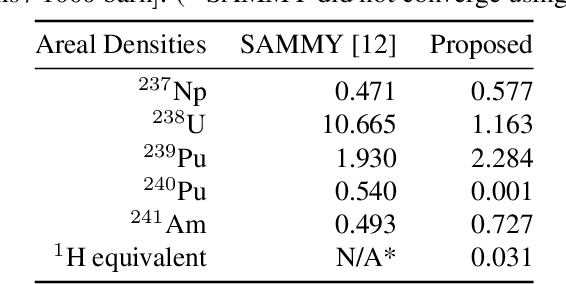
Feb 24, 2023Accurate reconstruction of 2D and 3D isotope densities is a desired capability with great potential impact in applications such as evaluation and development of next-generation nuclear fuels. Neutron time-of-flight (TOF) resonance imaging offers a potential approach by exploiting the characteristic neutron adsorption spectra of each isotope. However, it is a major challenge to compute quantitatively accurate images due to a variety of confounding effects such as severe Poisson noise, background scatter, beam non-uniformity, absorption non-linearity, and extended source pulse duration. We present the TRINIDI algorithm which is based on a two-step process in which we first estimate the neutron flux and background counts, and then reconstruct the areal densities of each isotope and pixel. Both components are based on the inversion of a forward model that accounts for the highly non-linear absorption, energy-dependent emission profile, and Poisson noise, while also modeling the substantial spatio-temporal variation of the background and flux. To do this, we formulate the non-linear inverse problem as two optimization problems that are solved in sequence. We demonstrate on both synthetic and measured data that TRINIDI can reconstruct quantitatively accurate 2D views of isotopic areal density that can then be reconstructed into quantitatively accurate 3D volumes of isotopic volumetric density.
Hyperspectral Neutron CT with Material Decomposition
Oct 06, 2021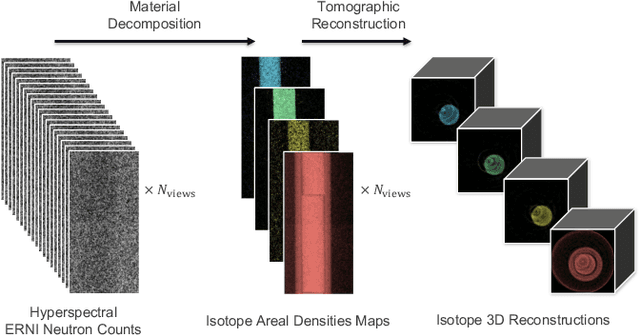

Energy resolved neutron imaging (ERNI) is an advanced neutron radiography technique capable of non-destructively extracting spatial isotopic information within a given material. Energy-dependent radiography image sequences can be created by utilizing neutron time-of-flight techniques. In combination with uniquely characteristic isotopic neutron cross-section spectra, isotopic areal densities can be determined on a per-pixel basis, thus resulting in a set of areal density images for each isotope present in the sample. By preforming ERNI measurements over several rotational views, an isotope decomposed 3D computed tomography is possible. We demonstrate a method involving a robust and automated background estimation based on a linear programming formulation. The extremely high noise due to low count measurements is overcome using a sparse coding approach. It allows for a significant computation time improvement, from weeks to a few hours compared to existing neutron evaluation tools, enabling at the present stage a semi-quantitative, user-friendly routine application.
* 5 pages, 4 figures
Multi-Slice Fusion for Sparse-View and Limited-Angle 4D CT Reconstruction
Aug 01, 2020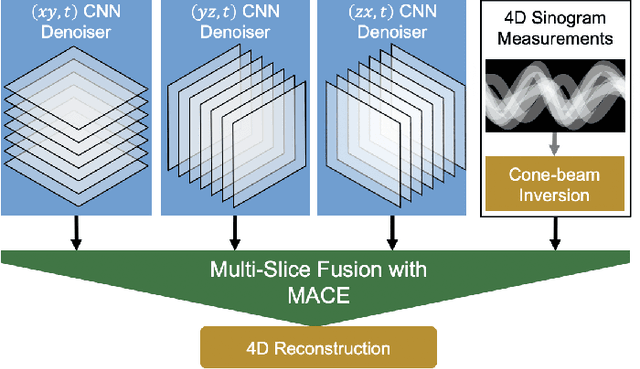
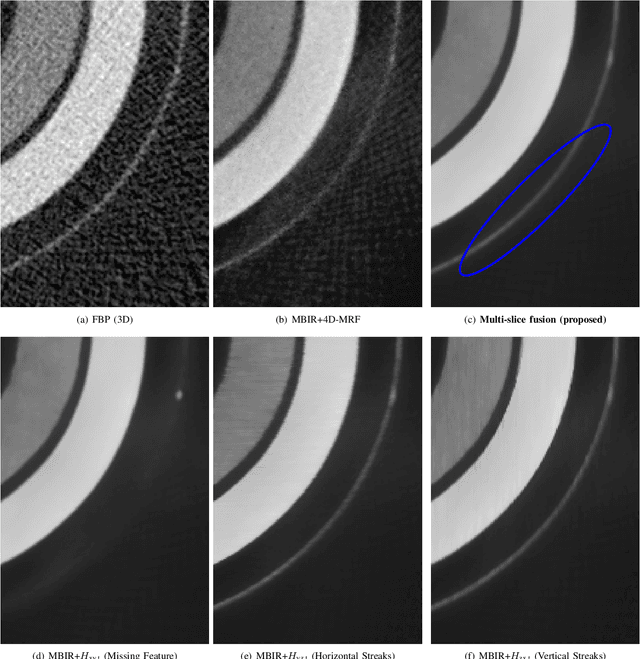
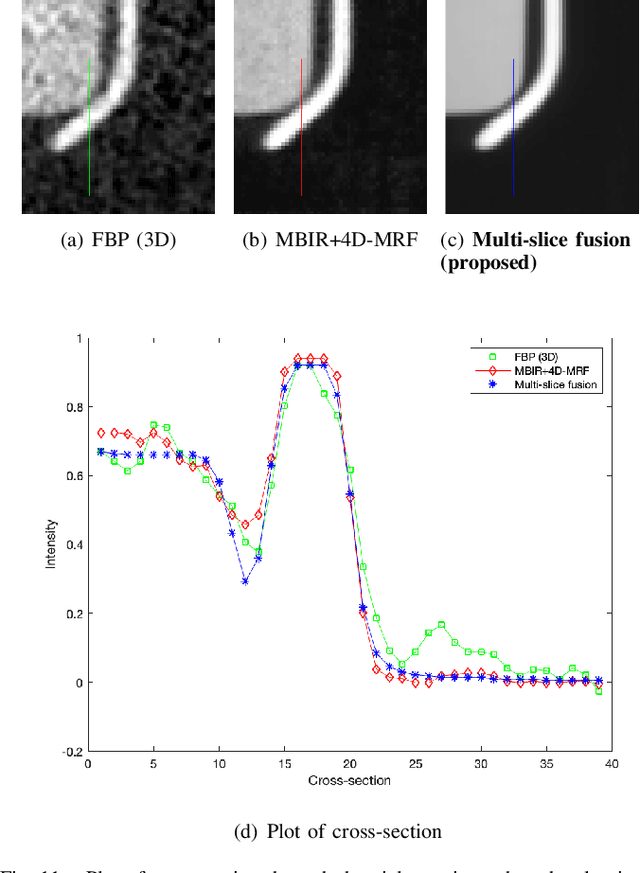
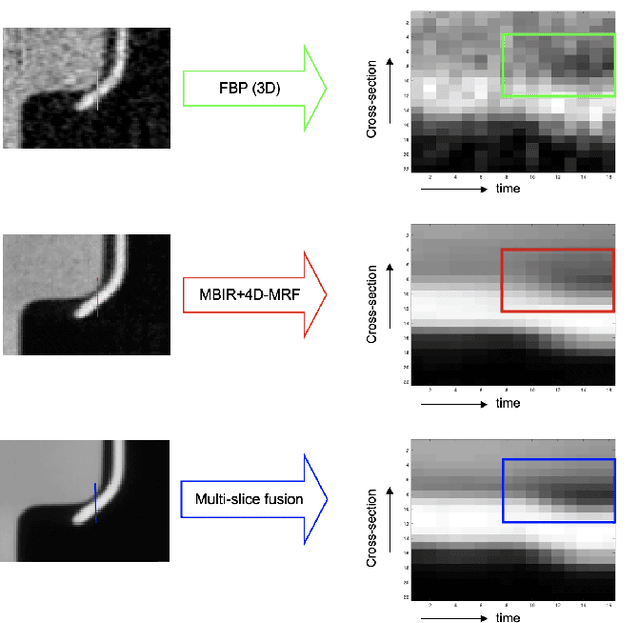
Inverse problems spanning four or more dimensions such as space, time and other independent parameters have become increasingly important. State-of-the-art 4D reconstruction methods use model based iterative reconstruction (MBIR), but depend critically on the quality of the prior modeling. Recently, plug-and-play (PnP) methods have been shown to be an effective way to incorporate advanced prior models using state-of-the-art denoising algorithms. However, state-of-the-art denoisers such as BM4D and deep convolutional neural networks (CNNs) are primarily available for 2D or 3D images and extending them to higher dimensions is difficult due to algorithmic complexity and the increased difficulty of effective training. In this paper, we present multi-slice fusion, a novel algorithm for 4D reconstruction, based on the fusion of multiple low-dimensional denoisers. Our approach uses multi-agent consensus equilibrium (MACE), an extension of plug-and-play, as a framework for integrating the multiple lower-dimensional models. We apply our method to 4D cone-beam X-ray CT reconstruction for non destructive evaluation (NDE) of samples that are dynamically moving during acquisition. We implement multi-slice fusion on distributed, heterogeneous clusters in order to reconstruct large 4D volumes in reasonable time and demonstrate the inherent parallelizable nature of the algorithm. We present simulated and real experimental results on sparse-view and limited-angle CT data to demonstrate that multi-slice fusion can substantially improve the quality of reconstructions relative to traditional methods, while also being practical to implement and train.
4D X-Ray CT Reconstruction using Multi-Slice Fusion
Jun 15, 2019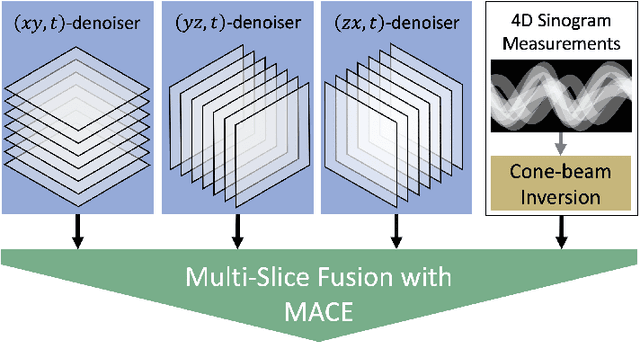
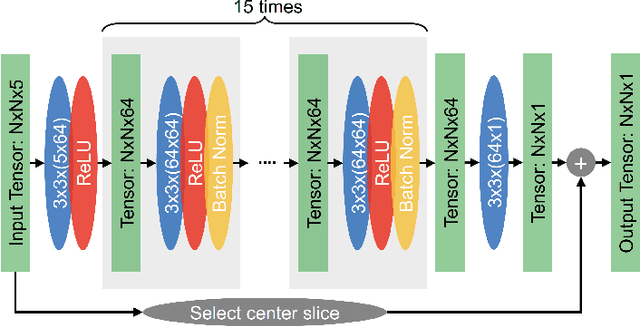
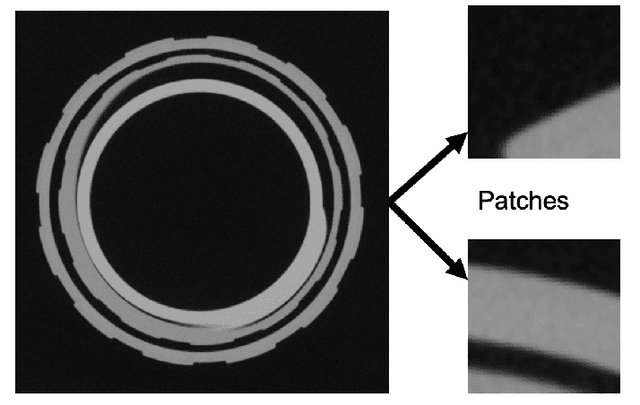
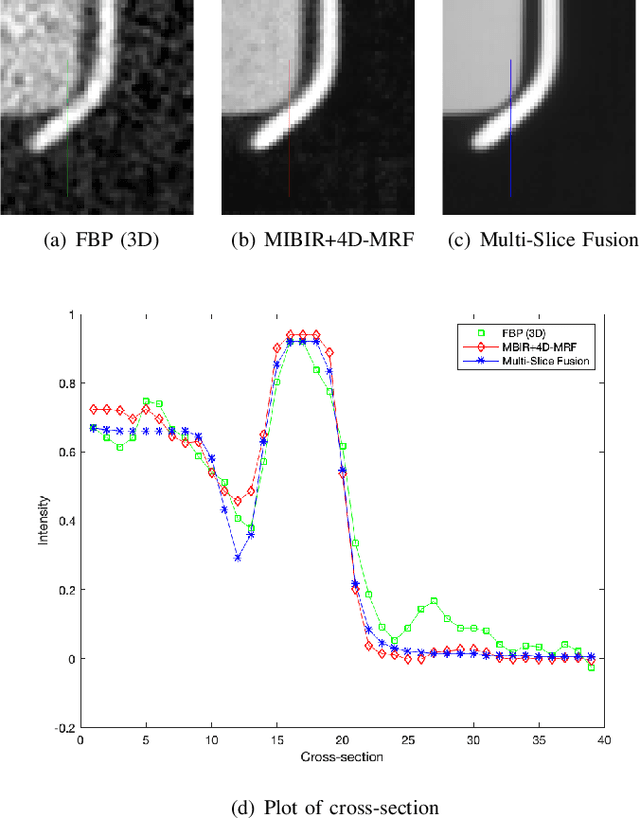
There is an increasing need to reconstruct objects in four or more dimensions corresponding to space, time and other independent parameters. The best 4D reconstruction algorithms use regularized iterative reconstruction approaches such as model based iterative reconstruction (MBIR), which depends critically on the quality of the prior modeling. Recently, Plug-and-Play methods have been shown to be an effective way to incorporate advanced prior models using state-of-the-art denoising algorithms designed to remove additive white Gaussian noise (AWGN). However, state-of-the-art denoising algorithms such as BM4D and deep convolutional neural networks (CNNs) are primarily available for 2D and sometimes 3D images. In particular, CNNs are difficult and computationally expensive to implement in four or more dimensions, and training may be impossible if there is no associated high-dimensional training data. In this paper, we present Multi-Slice Fusion, a novel algorithm for 4D and higher-dimensional reconstruction, based on the fusion of multiple low-dimensional denoisers. Our approach uses multi-agent consensus equilibrium (MACE), an extension of Plug-and-Play, as a framework for integrating the multiple lower-dimensional prior models. We apply our method to the problem of 4D cone-beam X-ray CT reconstruction for Non Destructive Evaluation (NDE) of moving parts. This is done by solving the MACE equations using lower-dimensional CNN denoisers implemented in parallel on a heterogeneous cluster. Results on experimental CT data demonstrate that Multi-Slice Fusion can substantially improve the quality of reconstructions relative to traditional 4D priors, while also being practical to implement and train.