 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-weighted Multi-pose Fusion for Metal Artifact Reduction in X-ray Computed Tomography
Jun 25, 2024X-ray computed tomography (CT) reconstructs the internal morphology of a three dimensional object from a collection of projection images, most commonly using a single rotation axis. However, for objects containing dense materials like metal, the use of a single rotation axis may leave some regions of the object obscured by the metal, even though projections from other rotation axes (or poses) might contain complementary information that would better resolve these obscured regions. In this paper, we propose pixel-weighted Multi-pose Fusion to reduce metal artifacts by fusing the information from complementary measurement poses into a single reconstruction. Our method uses Multi-Agent Consensus Equilibrium (MACE), an extension of Plug-and-Play, as a framework for integrating projection data from different poses. A primary novelty of the proposed method is that the output of different MACE agents are fused in a pixel-weighted manner to minimize the effects of metal throughout the reconstruction. Using real CT data on an object with and without metal inserts, we demonstrate that the proposed pixel-weighted Multi-pose Fusion method significantly reduces metal artifacts relative to single-pose reconstructions.
CodEx: A Modular Framework for Joint Temporal De-blurring and Tomographic Reconstruction
Nov 11, 2021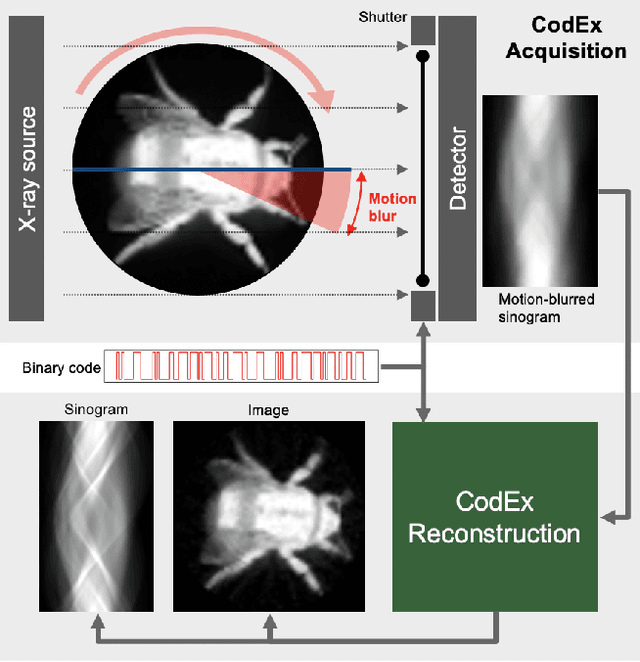
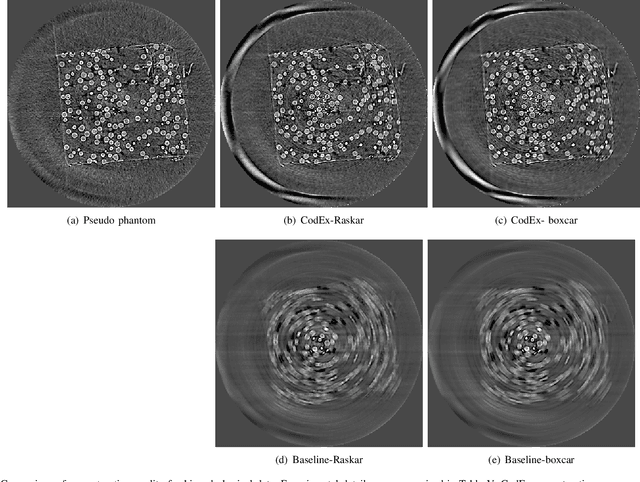
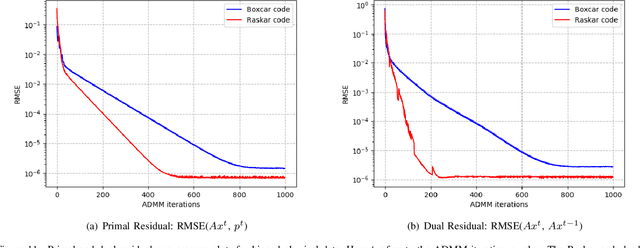
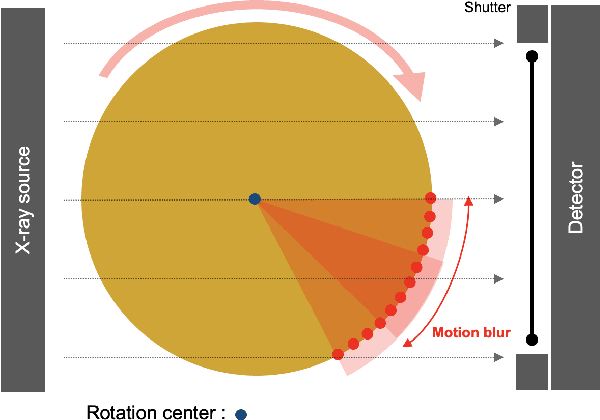
In many computed tomography (CT) imaging applications, it is important to rapidly collect data from an object that is moving or changing with time. Tomographic acquisition is generally assumed to be step-and-shoot, where the object is rotated to each desired angle, and a view is taken. However, step-and-shoot acquisition is slow and can waste photons, so in practice fly-scanning is done where the object is continuously rotated while collecting data. However, this can result in motion-blurred views and consequently reconstructions with severe motion artifacts. In this paper, we introduce CodEx, a modular framework for joint de-blurring and tomographic reconstruction that can effectively invert the motion blur introduced in fly-scanning. The method is a synergistic combination of a novel acquisition method with a novel non-convex Bayesian reconstruction algorithm. CodEx works by encoding the acquisition with a known binary code that the reconstruction algorithm then inverts. Using a well chosen binary code to encode the measurements can improve the accuracy of the inversion process. The CodEx reconstruction method uses the alternating direction method of multipliers (ADMM) to split the inverse problem into iterative deblurring and reconstruction sub-problems, making reconstruction practical to implement. We present reconstruction results on both simulated and experimental data to demonstrate the effectiveness of our method.
Multi-Slice Fusion for Sparse-View and Limited-Angle 4D CT Reconstruction
Aug 01, 2020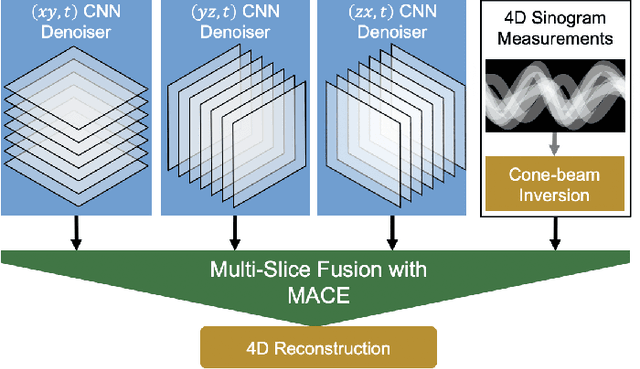
Inverse problems spanning four or more dimensions such as space, time and other independent parameters have become increasingly important. State-of-the-art 4D reconstruction methods use model based iterative reconstruction (MBIR), but depend critically on the quality of the prior modeling. Recently, plug-and-play (PnP) methods have been shown to be an effective way to incorporate advanced prior models using state-of-the-art denoising algorithms. However, state-of-the-art denoisers such as BM4D and deep convolutional neural networks (CNNs) are primarily available for 2D or 3D images and extending them to higher dimensions is difficult due to algorithmic complexity and the increased difficulty of effective training. In this paper, we present multi-slice fusion, a novel algorithm for 4D reconstruction, based on the fusion of multiple low-dimensional denoisers. Our approach uses multi-agent consensus equilibrium (MACE), an extension of plug-and-play, as a framework for integrating the multiple lower-dimensional models. We apply our method to 4D cone-beam X-ray CT reconstruction for non destructive evaluation (NDE) of samples that are dynamically moving during acquisition. We implement multi-slice fusion on distributed, heterogeneous clusters in order to reconstruct large 4D volumes in reasonable time and demonstrate the inherent parallelizable nature of the algorithm. We present simulated and real experimental results on sparse-view and limited-angle CT data to demonstrate that multi-slice fusion can substantially improve the quality of reconstructions relative to traditional methods, while also being practical to implement and train.
4D X-Ray CT Reconstruction using Multi-Slice Fusion
Jun 15, 2019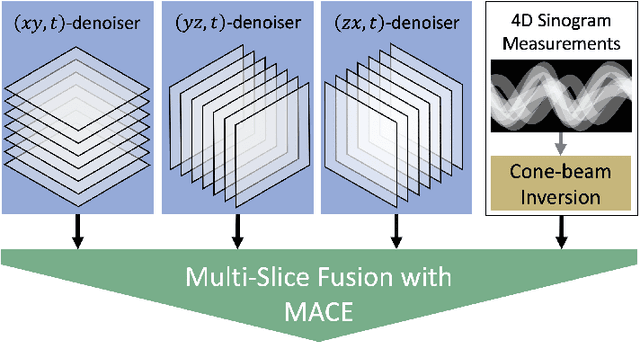
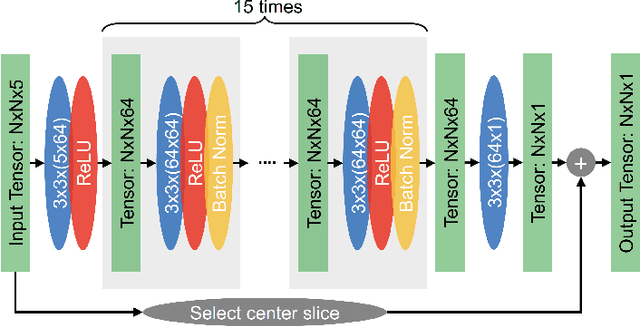
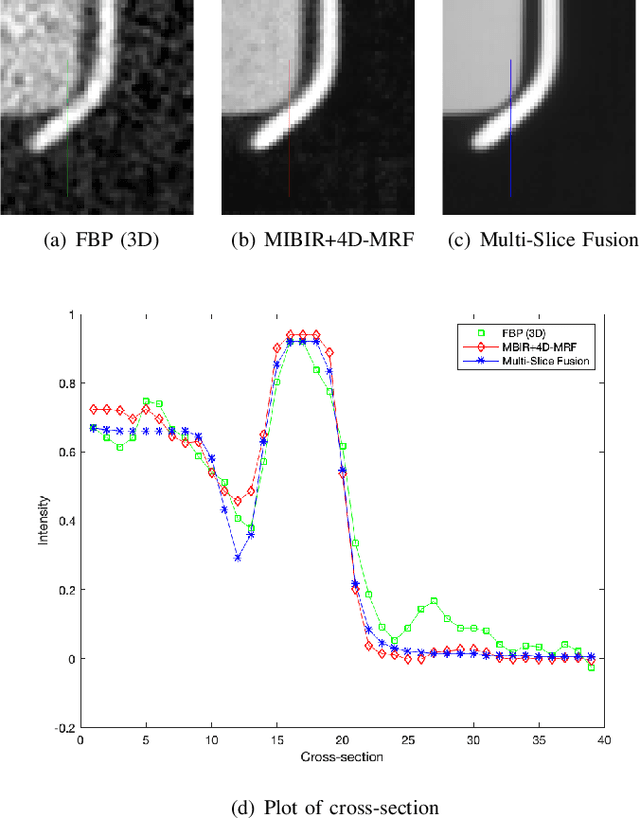
There is an increasing need to reconstruct objects in four or more dimensions corresponding to space, time and other independent parameters. The best 4D reconstruction algorithms use regularized iterative reconstruction approaches such as model based iterative reconstruction (MBIR), which depends critically on the quality of the prior modeling. Recently, Plug-and-Play methods have been shown to be an effective way to incorporate advanced prior models using state-of-the-art denoising algorithms designed to remove additive white Gaussian noise (AWGN). However, state-of-the-art denoising algorithms such as BM4D and deep convolutional neural networks (CNNs) are primarily available for 2D and sometimes 3D images. In particular, CNNs are difficult and computationally expensive to implement in four or more dimensions, and training may be impossible if there is no associated high-dimensional training data. In this paper, we present Multi-Slice Fusion, a novel algorithm for 4D and higher-dimensional reconstruction, based on the fusion of multiple low-dimensional denoisers. Our approach uses multi-agent consensus equilibrium (MACE), an extension of Plug-and-Play, as a framework for integrating the multiple lower-dimensional prior models. We apply our method to the problem of 4D cone-beam X-ray CT reconstruction for Non Destructive Evaluation (NDE) of moving parts. This is done by solving the MACE equations using lower-dimensional CNN denoisers implemented in parallel on a heterogeneous cluster. Results on experimental CT data demonstrate that Multi-Slice Fusion can substantially improve the quality of reconstructions relative to traditional 4D priors, while also being practical to implement and train.