 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision Transformers for Efficient Indoor Pathloss Radio Map Prediction
Dec 12, 2024



Vision Transformers (ViTs) have demonstrated remarkable success in achieving state-of-the-art performance across various image-based tasks and beyond. In this study, we employ a ViT-based neural network to address the problem of indoor pathloss radio map prediction. The network's generalization ability is evaluated across diverse settings, including unseen buildings, frequencies, and antennas with varying radiation patterns. By leveraging extensive data augmentation techniques and pretrained DINOv2 weights, we achieve promising results, even under the most challenging scenarios.
Outdoor Environment Reconstruction with Deep Learning on Radio Propagation Paths
Feb 27, 2024


Conventional methods for outdoor environment reconstruction rely predominantly on vision-based techniques like photogrammetry and LiDAR, facing limitations such as constrained coverage, susceptibility to environmental conditions, and high computational and energy demands. These challenges are particularly pronounced in applications like augmented reality navigation, especially when integrated with wearable devices featuring constrained computational resources and energy budgets. In response, this paper proposes a novel approach harnessing ambient wireless signals for outdoor environment reconstruction. By analyzing radio frequency (RF) data, the paper aims to deduce the environmental characteristics and digitally reconstruct the outdoor surroundings. Investigating the efficacy of selected deep learning (DL) techniques on the synthetic RF dataset WAIR-D, the study endeavors to address the research gap in this domain. Two DL-driven approaches are evaluated (convolutional U-Net and CLIP+ based on vision transformers), with performance assessed using metrics like intersection-over-union (IoU), Hausdorff distance, and Chamfer distance. The results demonstrate promising performance of the RF-based reconstruction method, paving the way towards lightweight and scalable reconstruction solutions.
ML-based Approaches for Wireless NLOS Localization: Input Representations and Uncertainty Estimation
Apr 22, 2023



The challenging problem of non-line-of-sight (NLOS) localization is critical for many wireless networking applications. The lack of available datasets has made NLOS localization difficult to tackle with ML-driven methods, but recent developments in synthetic dataset generation have provided new opportunities for research. This paper explores three different input representations: (i) single wireless radio path features, (ii) wireless radio link features (multi-path), and (iii) image-based representations. Inspired by the two latter new representations, we design two convolutional neural networks (CNNs) and we demonstrate that, although not significantly improving the NLOS localization performance, they are able to support richer prediction outputs, thus allowing deeper analysis of the predictions. In particular, the richer outputs enable reliable identification of non-trustworthy predictions and support the prediction of the top-K candidate locations for a given instance. We also measure how the availability of various features (such as angles of signal departure and arrival) affects the model's performance, providing insights about the types of data that should be collected for enhanced NLOS localization. Our insights motivate future work on building more efficient neural architectures and input representations for improved NLOS localization performance, along with additional useful application features.
Agnostic Learning for Packing Machine Stoppage Prediction in Smart Factories
Dec 12, 2022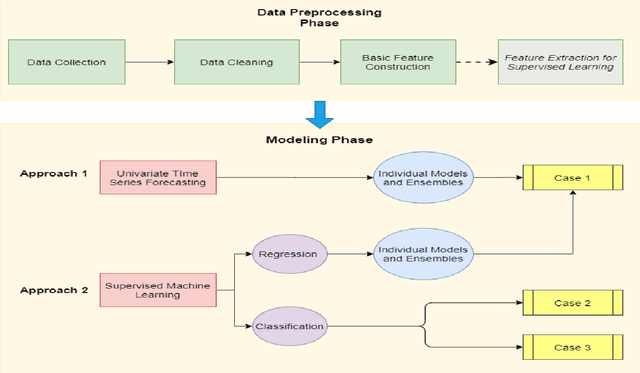

The cyber-physical convergence is opening up new business opportunities for industrial operators. The need for deep integration of the cyber and the physical worlds establishes a rich business agenda towards consolidating new system and network engineering approaches. This revolution would not be possible without the rich and heterogeneous sources of data, as well as the ability of their intelligent exploitation, mainly due to the fact that data will serve as a fundamental resource to promote Industry 4.0. One of the most fruitful research and practice areas emerging from this data-rich, cyber-physical, smart factory environment is the data-driven process monitoring field, which applies machine learning methodologies to enable predictive maintenance applications. In this paper, we examine popular time series forecasting techniques as well as supervised machine learning algorithms in the applied context of Industry 4.0, by transforming and preprocessing the historical industrial dataset of a packing machine's operational state recordings (real data coming from the production line of a manufacturing plant from the food and beverage domain). In our methodology, we use only a single signal concerning the machine's operational status to make our predictions, without considering other operational variables or fault and warning signals, hence its characterization as ``agnostic''. In this respect, the results demonstrate that the adopted methods achieve a quite promising performance on three targeted use cases.