 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Driven Aircraft Trajectory Prediction with Deep Imitation Learning
May 16, 2020
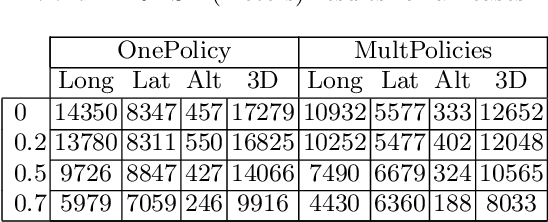
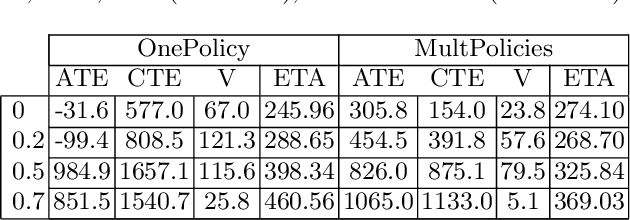
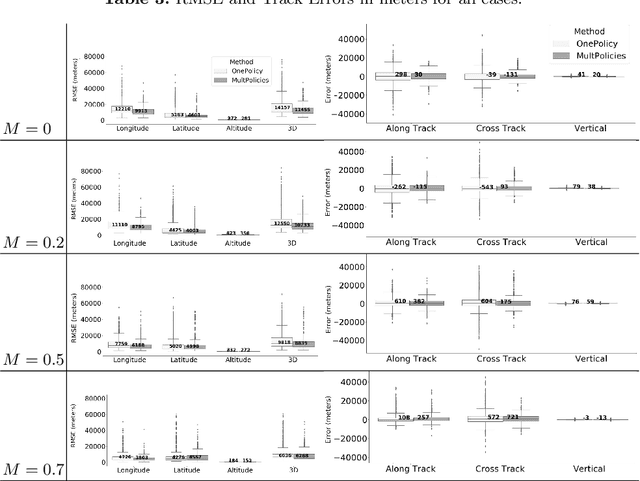
The current Air Traffic Management (ATM) system worldwide has reached its limits in terms of predictability, efficiency and cost effectiveness. Different initiatives worldwide propose trajectory-oriented transformations that require high fidelity aircraft trajectory planning and prediction capabilities, supporting the trajectory life cycle at all stages efficiently. Recently proposed data-driven trajectory prediction approaches provide promising results. In this paper we approach the data-driven trajectory prediction problem as an imitation learning task, where we aim to imitate experts "shaping" the trajectory. Towards this goal we present a comprehensive framework comprising the Generative Adversarial Imitation Learning state of the art method, in a pipeline with trajectory clustering and classification methods. This approach, compared to other approaches, can provide accurate predictions for the whole trajectory (i.e. with a prediction horizon until reaching the destination) both at the pre-tactical (i.e. starting at the departure airport at a specific time instant) and at the tactical (i.e. from any state while flying) stages, compared to state of the art approaches.
Resolving Congestions in the Air Traffic Management Domain via Multiagent Reinforcement Learning Methods
Dec 14, 2019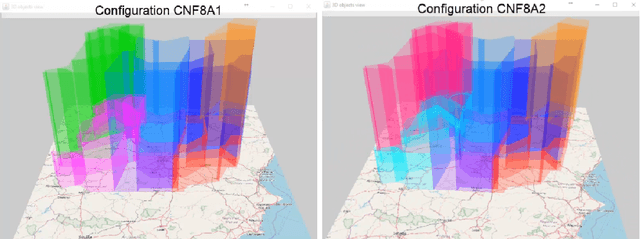
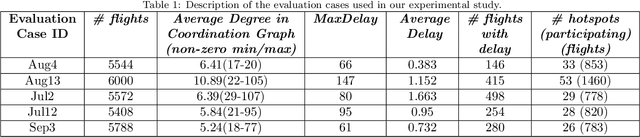
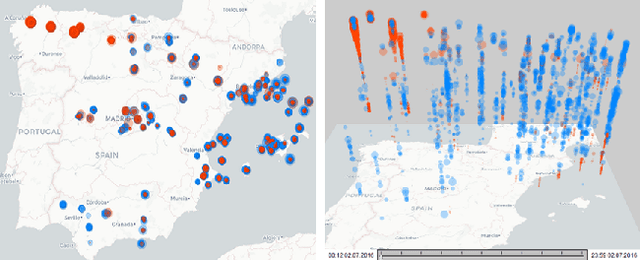
In this article, we report on the efficiency and effectiveness of multiagent reinforcement learning methods (MARL) for the computation of flight delays to resolve congestion problems in the Air Traffic Management (ATM) domain. Specifically, we aim to resolve cases where demand of airspace use exceeds capacity (demand-capacity problems), via imposing ground delays to flights at the pre-tactical stage of operations (i.e. few days to few hours before operation). Casting this into the multiagent domain, agents, representing flights, need to decide on own delays w.r.t. own preferences, having no information about others' payoffs, preferences and constraints, while they plan to execute their trajectories jointly with others, adhering to operational constraints. Specifically, we formalize the problem as a multiagent Markov Decision Process (MA-MDP) and we show that it can be considered as a Markov game in which interacting agents need to reach an equilibrium: What makes the problem more interesting is the dynamic setting in which agents operate, which is also due to the unforeseen, emergent effects of their decisions in the whole system. We propose collaborative multiagent reinforcement learning methods to resolve demand-capacity imbalances: Extensive experimental study on real-world cases, shows the potential of the proposed approaches in resolving problems, while advanced visualizations provide detailed views towards understanding the quality of solutions provided.