 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning-based Robust Autonomous Navigation of Aerial Robots in Dense Forests
Dec 19, 2025Autonomous aerial navigation in dense natural environments remains challenging due to limited visibility, thin and irregular obstacles, GNSS-denied operation, and frequent perceptual degradation. This work presents an improved deep learning-based navigation framework that integrates semantically enhanced depth encoding with neural motion-primitive evaluation for robust flight in cluttered forests. Several modules are incorporated on top of the original sevae-ORACLE algorithm to address limitations observed during real-world deployment, including lateral control for sharper maneuvering, a temporal consistency mechanism to suppress oscillatory planning decisions, a stereo-based visual-inertial odometry solution for drift-resilient state estimation, and a supervisory safety layer that filters unsafe actions in real time. A depth refinement stage is included to improve the representation of thin branches and reduce stereo noise, while GPU optimization increases onboard inference throughput from 4 Hz to 10 Hz. The proposed approach is evaluated against several existing learning-based navigation methods under identical environmental conditions and hardware constraints. It demonstrates higher success rates, more stable trajectories, and improved collision avoidance, particularly in highly cluttered forest settings. The system is deployed on a custom quadrotor in three boreal forest environments, achieving fully autonomous completion in all flights in moderate and dense clutter, and 12 out of 15 flights in highly dense underbrush. These results demonstrate improved reliability and safety over existing navigation methods in complex natural environments.
Field evaluation and optimization of a lightweight lidar-based UAV navigation system for dense boreal forest environments
Dec 16, 2025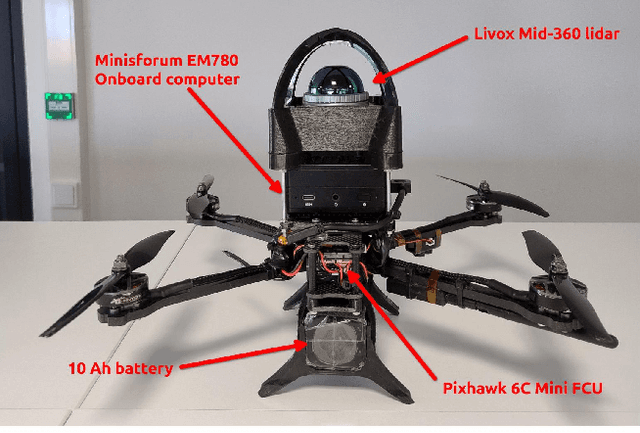
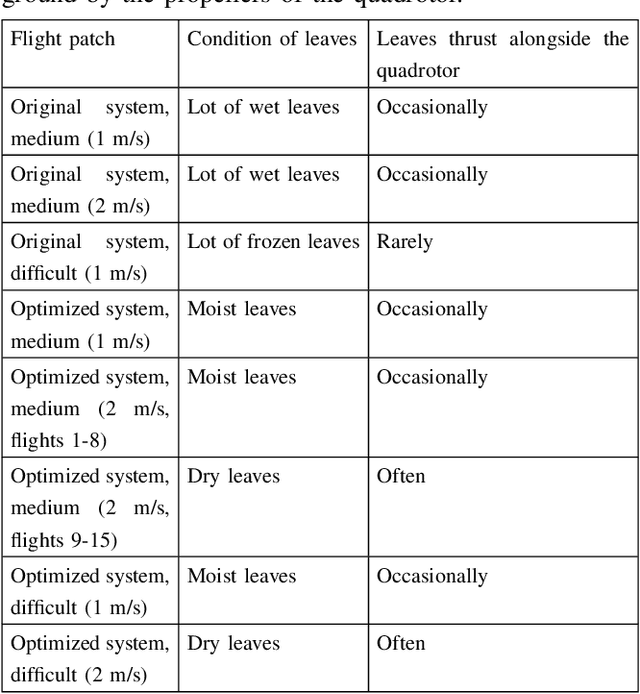

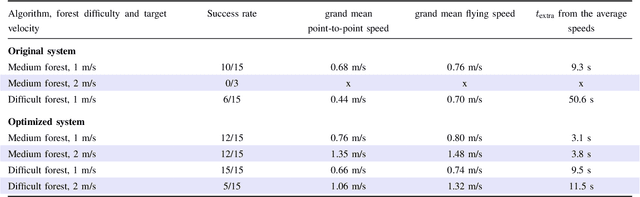
The interest in the usage of uncrewed aerial vehicles (UAVs) for forest applications has increased in recent years. While above-canopy flight has reached a high level of autonomy, navigating under-canopy remains a significant challenge. The use of autonomous UAVs could reduce the burden of data collection, which has motivated the development of numerous solutions for under-canopy autonomous flight. However, the experiments conducted in the literature and their reporting lack rigor. Very rarely, the density and the difficulty of the test forests are reported, or multiple flights are flown, and the success rate of those flights is reported. The aim of this study was to implement an autonomously flying quadrotor based on a lightweight lidar using openly available algorithms and test its behavior in real forest environments. A set of rigorous experiments was conducted with a quadrotor prototype utilizing the IPC path planner and LTA-OM SLAM algorithm. Based on the results of the first 33 flights, the original system was further enhanced. With the optimized system, 60 flights were performed, resulting in a total of 93 test flights. The optimized system performed significantly better in terms of reliability and flight mission completion times, achieving success rates of 12/15 in a medium-density forest and 15/15 in a dense forest, at a target flight velocity of 1 m/s. At a target flight velocity of 2 m/s, it had a success rate of 12/15 and 5/15, respectively. Furthermore, a standardized testing setup and evaluation criteria were proposed, enabling consistent performance comparisons of autonomous under-canopy UAV systems, enhancing reproducibility, guiding system improvements, and accelerating progress in forest robotics.
Towards autonomous photogrammetric forest inventory using a lightweight under-canopy robotic drone
Jan 21, 2025Drones are increasingly used in forestry to capture high-resolution remote sensing data. While operations above the forest canopy are already highly automated, flying inside forests remains challenging, primarily relying on manual piloting. Inside dense forests, reliance on the Global Navigation Satellite System (GNSS) for localization is not feasible. Additionally, the drone must autonomously adjust its flight path to avoid collisions. Recently, advancements in robotics have enabled autonomous drone flights in GNSS-denied obstacle-rich areas. In this article, a step towards autonomous forest data collection is taken by building a prototype of a robotic under-canopy drone utilizing state-of-the-art open-source methods and validating its performance for data collection inside forests. The autonomous flight capability was evaluated through multiple test flights in two boreal forest test sites. The tree parameter estimation capability was studied by conducting diameter at breast height (DBH) estimation using onboard stereo camera data and photogrammetric methods. The prototype conducted flights in selected challenging forest environments, and the experiments showed excellent performance in forest reconstruction with a miniaturized stereoscopic photogrammetric system. The stem detection algorithm managed to identify 79.31 % of the stems. The DBH estimation had a root mean square error (RMSE) of 3.33 cm (12.79 %) and a bias of 1.01 cm (3.87 %) across all trees. For trees with a DBH less than 30 cm, the RMSE was 1.16 cm (5.74 %), and the bias was 0.13 cm (0.64 %). When considering the overall performance in terms of DBH accuracy, autonomy, and forest complexity, the proposed approach was superior compared to methods proposed in the scientific literature. Results provided valuable insights into autonomous forest reconstruction using drones, and several further development topics were proposed.
Unsupervised semantic segmentation of urban high-density multispectral point clouds
Oct 24, 2024



The availability of highly accurate urban airborne laser scanning (ALS) data will increase rapidly in the future, especially as acquisition costs decrease, for example through the use of drones. Current challenges in data processing are related to the limited spectral information and low point density of most ALS datasets. Another challenge will be the growing need for annotated training data, frequently produced by manual processes, to enable semantic interpretation of point clouds. This study proposes to semantically segment new high-density (1200 points per square metre on average) multispectral ALS data with an unsupervised ground-aware deep clustering method GroupSP inspired by the unsupervised GrowSP algorithm. GroupSP divides the scene into superpoints as a preprocessing step. The neural network is trained iteratively by grouping the superpoints and using the grouping assignments as pseudo-labels. The predictions for the unseen data are given by over-segmenting the test set and mapping the predicted classes into ground truth classes manually or with automated majority voting. GroupSP obtained an overall accuracy (oAcc) of 97% and a mean intersection over union (mIoU) of 80%. When compared to other unsupervised semantic segmentation methods, GroupSP outperformed GrowSP and non-deep K-means. However, a supervised random forest classifier outperformed GroupSP. The labelling efforts in GroupSP can be minimal; it was shown, that the GroupSP can semantically segment seven urban classes (building, high vegetation, low vegetation, asphalt, rock, football field, and gravel) with oAcc of 95% and mIoU of 75% using only 0.004% of the available annotated points in the mapping assignment. Finally, the multispectral information was examined; adding each new spectral channel improved the mIoU. Additionally, echo deviation was valuable, especially when distinguishing ground-level classes.
Detecting Wildfires on UAVs with Real-time Segmentation Trained by Larger Teacher Models
Aug 19, 2024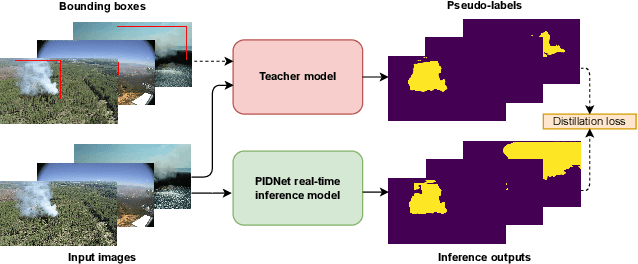
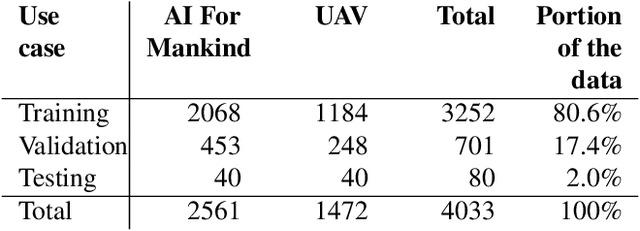
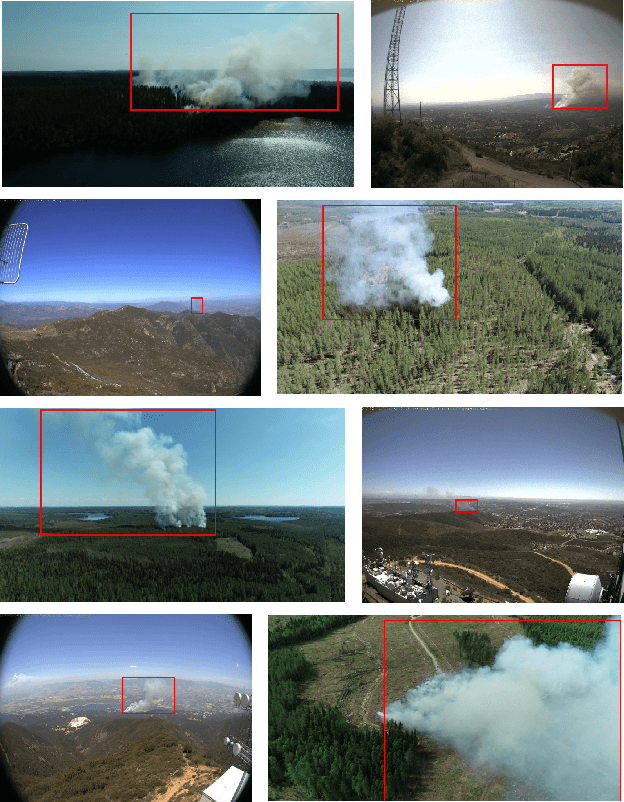
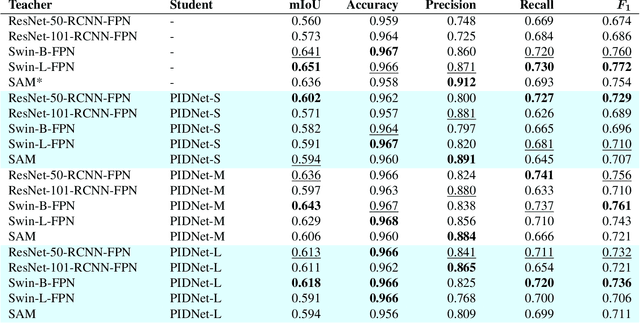
Early detection of wildfires is essential to prevent large-scale fires resulting in extensive environmental, structural, and societal damage. Uncrewed aerial vehicles (UAVs) can cover large remote areas effectively with quick deployment requiring minimal infrastructure and equipping them with small cameras and computers enables autonomous real-time detection. In remote areas, however, the UAVs are limited to on-board computing for detection due to the lack of high-bandwidth mobile networks. This limits the detection to methods which are light enough for the on-board computer alone. For accurate camera-based localisation, segmentation of the detected smoke is essential but training data for deep learning-based wildfire smoke segmentation is limited. This study shows how small specialised segmentation models can be trained using only bounding box labels, leveraging zero-shot foundation model supervision. The method offers the advantages of needing only fairly easily obtainable bounding box labels and requiring training solely for the smaller student network. The proposed method achieved 63.3% mIoU on a manually annotated and diverse wildfire dataset. The used model can perform in real-time at ~11 fps with a UAV-carried NVIDIA Jetson Orin NX computer while reliably recognising smoke, demonstrated at real-world forest burning events. Code is available at https://gitlab.com/fgi_nls/public/wildfire-real-time-segmentation