 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Image-based Tree Crown Segmentation from Enhanced Lidar-based Pseudo-labels
Feb 13, 2026Mapping individual tree crowns is essential for tasks such as maintaining urban tree inventories and monitoring forest health, which help us understand and care for our environment. However, automatically separating the crowns from each other in aerial imagery is challenging due to factors such as the texture and partial tree crown overlaps. In this study, we present a method to train deep learning models that segment and separate individual trees from RGB and multispectral images, using pseudo-labels derived from aerial laser scanning (ALS) data. Our study shows that the ALS-derived pseudo-labels can be enhanced using a zero-shot instance segmentation model, Segment Anything Model 2 (SAM 2). Our method offers a way to obtain domain-specific training annotations for optical image-based models without any manual annotation cost, leading to segmentation models which outperform any available models which have been targeted for general domain deployment on the same task.
Towards autonomous photogrammetric forest inventory using a lightweight under-canopy robotic drone
Jan 21, 2025Drones are increasingly used in forestry to capture high-resolution remote sensing data. While operations above the forest canopy are already highly automated, flying inside forests remains challenging, primarily relying on manual piloting. Inside dense forests, reliance on the Global Navigation Satellite System (GNSS) for localization is not feasible. Additionally, the drone must autonomously adjust its flight path to avoid collisions. Recently, advancements in robotics have enabled autonomous drone flights in GNSS-denied obstacle-rich areas. In this article, a step towards autonomous forest data collection is taken by building a prototype of a robotic under-canopy drone utilizing state-of-the-art open-source methods and validating its performance for data collection inside forests. The autonomous flight capability was evaluated through multiple test flights in two boreal forest test sites. The tree parameter estimation capability was studied by conducting diameter at breast height (DBH) estimation using onboard stereo camera data and photogrammetric methods. The prototype conducted flights in selected challenging forest environments, and the experiments showed excellent performance in forest reconstruction with a miniaturized stereoscopic photogrammetric system. The stem detection algorithm managed to identify 79.31 % of the stems. The DBH estimation had a root mean square error (RMSE) of 3.33 cm (12.79 %) and a bias of 1.01 cm (3.87 %) across all trees. For trees with a DBH less than 30 cm, the RMSE was 1.16 cm (5.74 %), and the bias was 0.13 cm (0.64 %). When considering the overall performance in terms of DBH accuracy, autonomy, and forest complexity, the proposed approach was superior compared to methods proposed in the scientific literature. Results provided valuable insights into autonomous forest reconstruction using drones, and several further development topics were proposed.
Detecting Wildfires on UAVs with Real-time Segmentation Trained by Larger Teacher Models
Aug 19, 2024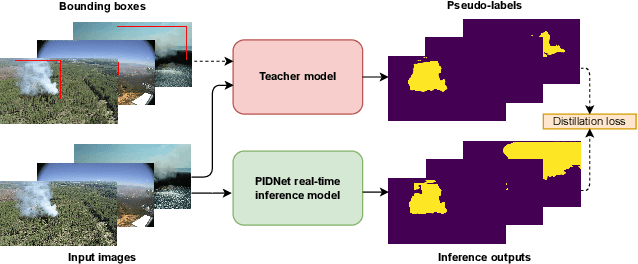
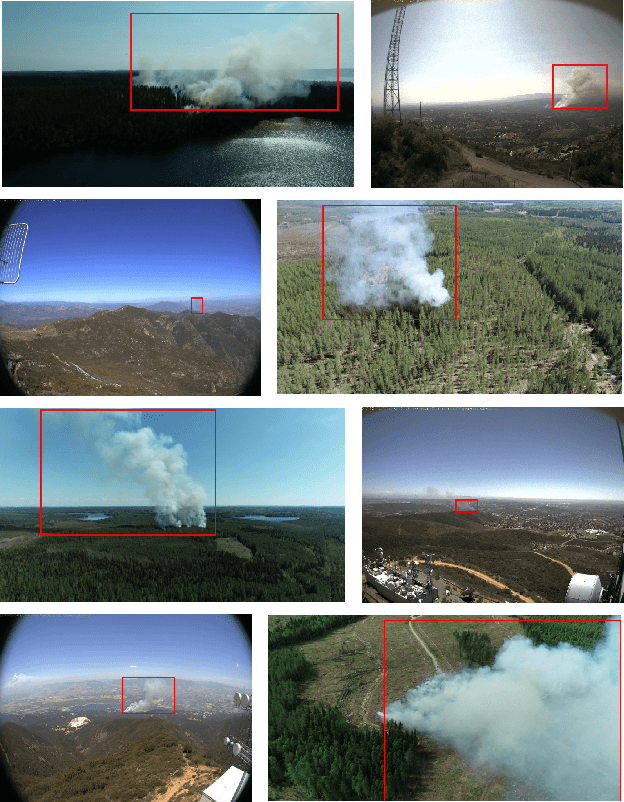
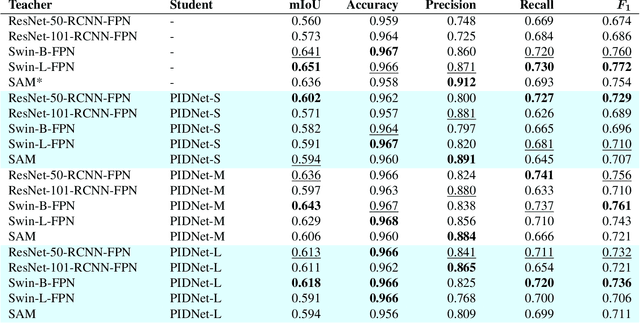
Early detection of wildfires is essential to prevent large-scale fires resulting in extensive environmental, structural, and societal damage. Uncrewed aerial vehicles (UAVs) can cover large remote areas effectively with quick deployment requiring minimal infrastructure and equipping them with small cameras and computers enables autonomous real-time detection. In remote areas, however, the UAVs are limited to on-board computing for detection due to the lack of high-bandwidth mobile networks. This limits the detection to methods which are light enough for the on-board computer alone. For accurate camera-based localisation, segmentation of the detected smoke is essential but training data for deep learning-based wildfire smoke segmentation is limited. This study shows how small specialised segmentation models can be trained using only bounding box labels, leveraging zero-shot foundation model supervision. The method offers the advantages of needing only fairly easily obtainable bounding box labels and requiring training solely for the smaller student network. The proposed method achieved 63.3% mIoU on a manually annotated and diverse wildfire dataset. The used model can perform in real-time at ~11 fps with a UAV-carried NVIDIA Jetson Orin NX computer while reliably recognising smoke, demonstrated at real-world forest burning events. Code is available at https://gitlab.com/fgi_nls/public/wildfire-real-time-segmentation