 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultispectral airborne laser scanning for tree species classification: a benchmark of machine learning and deep learning algorithms
Apr 19, 2025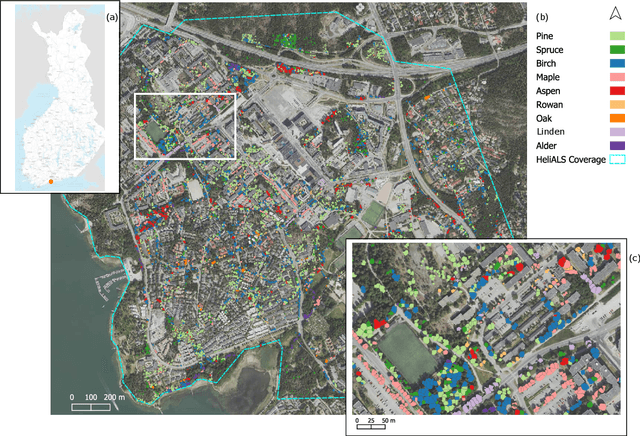
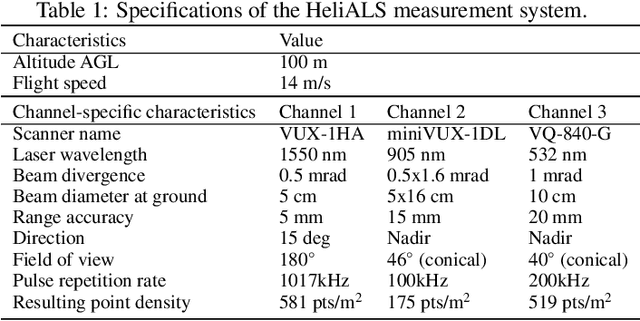
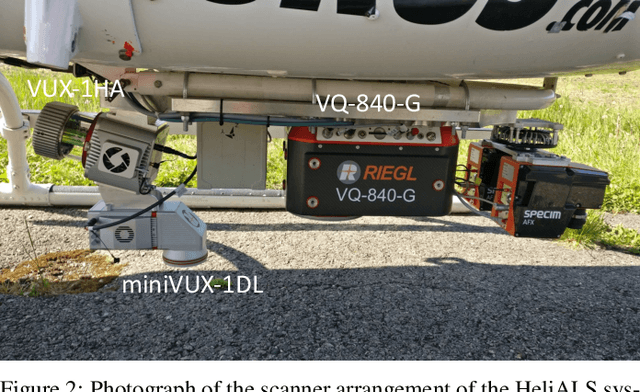
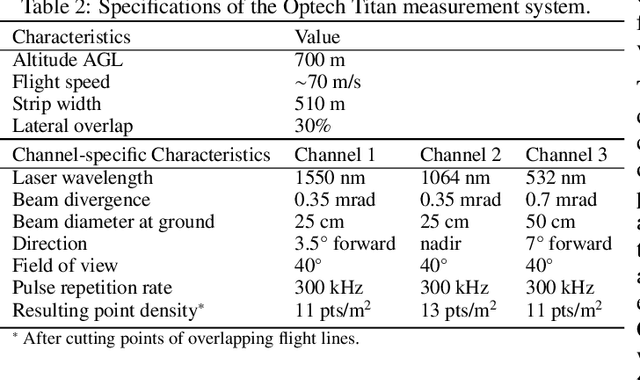
Climate-smart and biodiversity-preserving forestry demands precise information on forest resources, extending to the individual tree level. Multispectral airborne laser scanning (ALS) has shown promise in automated point cloud processing and tree segmentation, but challenges remain in identifying rare tree species and leveraging deep learning techniques. This study addresses these gaps by conducting a comprehensive benchmark of machine learning and deep learning methods for tree species classification. For the study, we collected high-density multispectral ALS data (>1000 pts/m$^2$) at three wavelengths using the FGI-developed HeliALS system, complemented by existing Optech Titan data (35 pts/m$^2$), to evaluate the species classification accuracy of various algorithms in a test site located in Southern Finland. Based on 5261 test segments, our findings demonstrate that point-based deep learning methods, particularly a point transformer model, outperformed traditional machine learning and image-based deep learning approaches on high-density multispectral point clouds. For the high-density ALS dataset, a point transformer model provided the best performance reaching an overall (macro-average) accuracy of 87.9% (74.5%) with a training set of 1065 segments and 92.0% (85.1%) with 5000 training segments. The best image-based deep learning method, DetailView, reached an overall (macro-average) accuracy of 84.3% (63.9%), whereas a random forest (RF) classifier achieved an overall (macro-average) accuracy of 83.2% (61.3%). Importantly, the overall classification accuracy of the point transformer model on the HeliALS data increased from 73.0% with no spectral information to 84.7% with single-channel reflectance, and to 87.9% with spectral information of all the three channels.
Unsupervised semantic segmentation of urban high-density multispectral point clouds
Oct 24, 2024



The availability of highly accurate urban airborne laser scanning (ALS) data will increase rapidly in the future, especially as acquisition costs decrease, for example through the use of drones. Current challenges in data processing are related to the limited spectral information and low point density of most ALS datasets. Another challenge will be the growing need for annotated training data, frequently produced by manual processes, to enable semantic interpretation of point clouds. This study proposes to semantically segment new high-density (1200 points per square metre on average) multispectral ALS data with an unsupervised ground-aware deep clustering method GroupSP inspired by the unsupervised GrowSP algorithm. GroupSP divides the scene into superpoints as a preprocessing step. The neural network is trained iteratively by grouping the superpoints and using the grouping assignments as pseudo-labels. The predictions for the unseen data are given by over-segmenting the test set and mapping the predicted classes into ground truth classes manually or with automated majority voting. GroupSP obtained an overall accuracy (oAcc) of 97% and a mean intersection over union (mIoU) of 80%. When compared to other unsupervised semantic segmentation methods, GroupSP outperformed GrowSP and non-deep K-means. However, a supervised random forest classifier outperformed GroupSP. The labelling efforts in GroupSP can be minimal; it was shown, that the GroupSP can semantically segment seven urban classes (building, high vegetation, low vegetation, asphalt, rock, football field, and gravel) with oAcc of 95% and mIoU of 75% using only 0.004% of the available annotated points in the mapping assignment. Finally, the multispectral information was examined; adding each new spectral channel improved the mIoU. Additionally, echo deviation was valuable, especially when distinguishing ground-level classes.