 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabel Flipping Data Poisoning Attack Against Wearable Human Activity Recognition System
Aug 17, 2022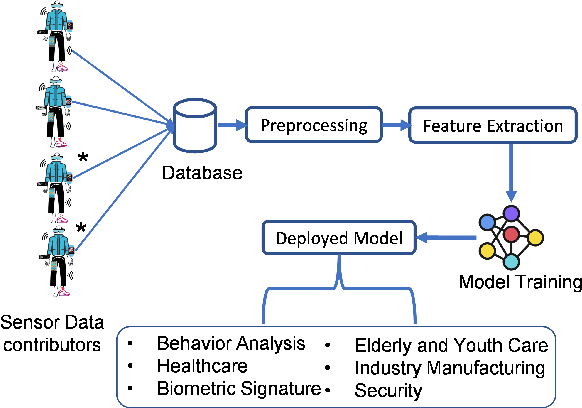


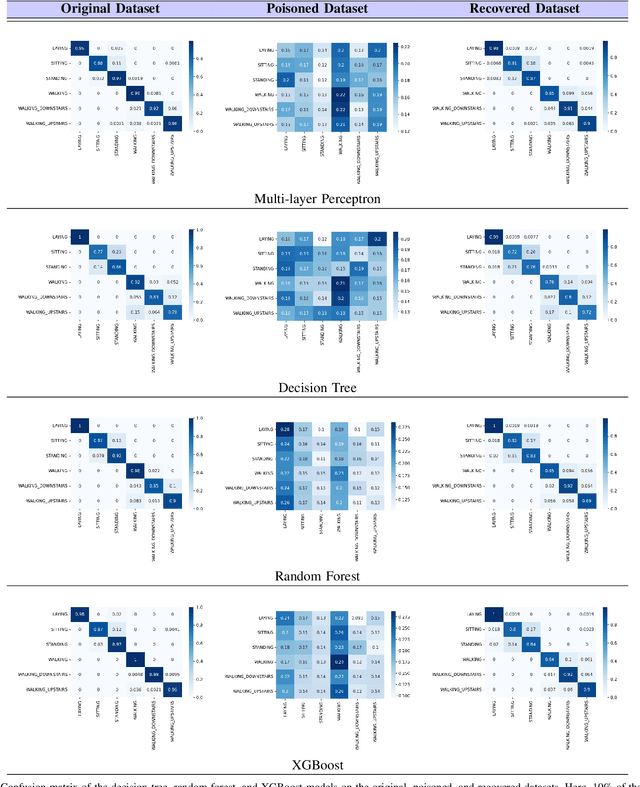
Human Activity Recognition (HAR) is a problem of interpreting sensor data to human movement using an efficient machine learning (ML) approach. The HAR systems rely on data from untrusted users, making them susceptible to data poisoning attacks. In a poisoning attack, attackers manipulate the sensor readings to contaminate the training set, misleading the HAR to produce erroneous outcomes. This paper presents the design of a label flipping data poisoning attack for a HAR system, where the label of a sensor reading is maliciously changed in the data collection phase. Due to high noise and uncertainty in the sensing environment, such an attack poses a severe threat to the recognition system. Besides, vulnerability to label flipping attacks is dangerous when activity recognition models are deployed in safety-critical applications. This paper shades light on how to carry out the attack in practice through smartphone-based sensor data collection applications. This is an earlier research work, to our knowledge, that explores attacking the HAR models via label flipping poisoning. We implement the proposed attack and test it on activity recognition models based on the following machine learning algorithms: multi-layer perceptron, decision tree, random forest, and XGBoost. Finally, we evaluate the effectiveness of K-nearest neighbors (KNN)-based defense mechanism against the proposed attack.
Feedback Motion Planning for Long-Range Autonomous Underwater Vehicles
Nov 21, 2019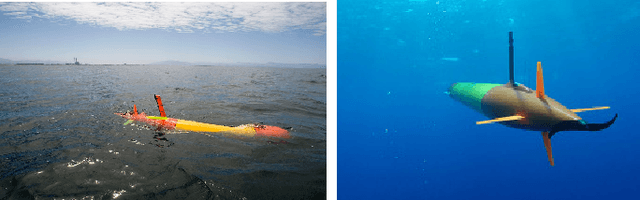

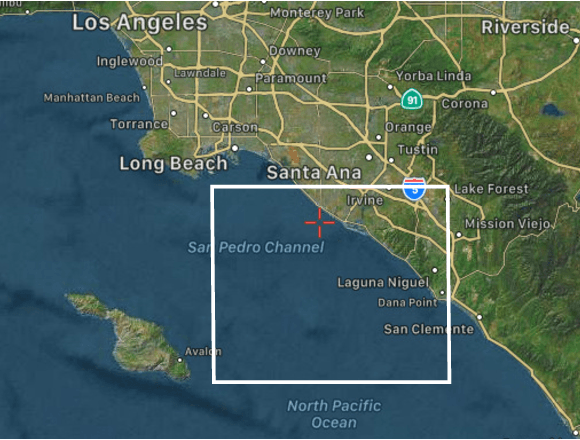
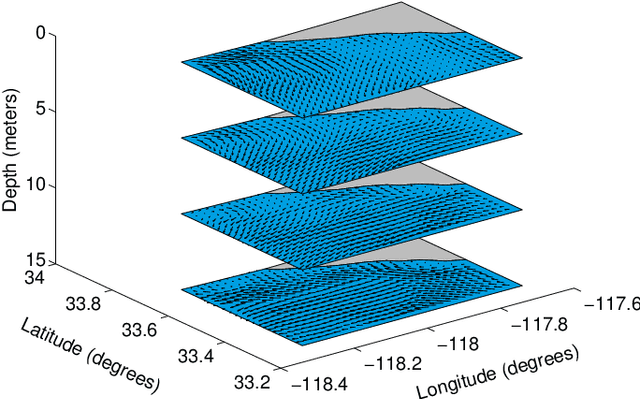
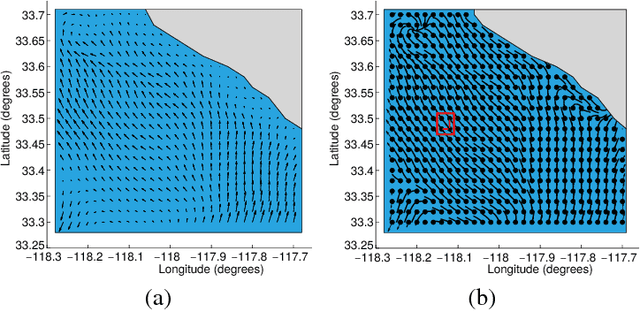
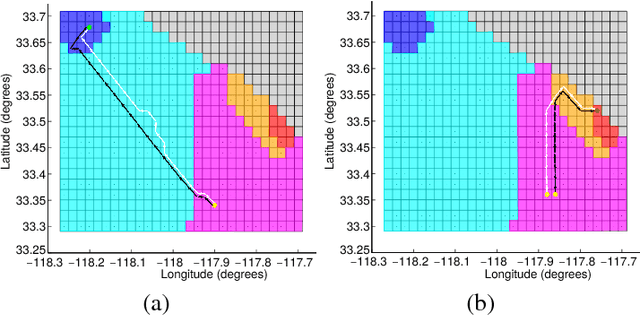
Ocean ecosystems have spatiotemporal variability and dynamic complexity that require a long-term deployment of an autonomous underwater vehicle for data collection. A new long-range autonomous underwater vehicle called Tethys is adapted to study different oceanic phenomena. Additionally, an ocean environment has external forces and moments along with changing water currents which are generally not considered in a vehicle kinematic model. In this scenario, it is not enough to generate a simple trajectory from an initial location to a goal location in an uncertain ocean as the vehicle can deviate from its intended trajectory. As such, we propose to compute a feedback plan that adapts the vehicle trajectory in the presence of any modeled or unmodeled uncertainties. In this work, we present a feedback motion planning method for the Tethys vehicle by combining a predictive ocean model and its kinematic modeling. Given a goal location, the Tethys kinematic model, and the water flow pattern, our method computes a feedback plan for the vehicle in a dynamic ocean environment that reduces its energy consumption. The computed feedback plan provides the optimal action for the Tethys vehicle to take from any location of the environment to reach the goal location considering its orientation. Our results based on actual ocean model prediction data demonstrate the applicability of our method.
An Underactuated Vehicle Localization Method in Marine Environments
Aug 15, 2018

The underactuated vehicles are apposite for the long-term deployment and data collection in spatiotemporally varying marine environments. However, these vehicles need to estimate their positions (states) with intrinsic sensing in their long-term trajectories. In previous studies, autonomous underwater vehicles have commonly used vision and range sensors for autonomous state estimation. Inspired by the intrinsic sensing and the persistent deployment, we investigate the localization problem (state estimation) for an inexpensive and underactuated drifting vehicle called a drifter. In this paper, we present a localization method for the drifter making use of the observations of a proprioceptive sensor, i.e., compass. We create the water flow pattern within a given region from ocean model predictions, develop a stochastic motion model, and analyze the persistent water flow behavior. Given a distribution of initial deployment states of the drifter at a particular depth of the water column within the region and the water flow pattern, our method finds attractors and their transient groups at the given depth as the persistent behavior of the water flow. A most-likely localized trajectory of the drifter for a sequence of compass observations is generated based on the persistent behavior of the water flow and hidden Markov model. Our simulation results based on data from ocean model predictions substantiate good performance of our proposed localization method with a low error rate of the state estimation in the long-term trajectory of the drifter.