 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback Motion Planning for Long-Range Autonomous Underwater Vehicles
Nov 21, 2019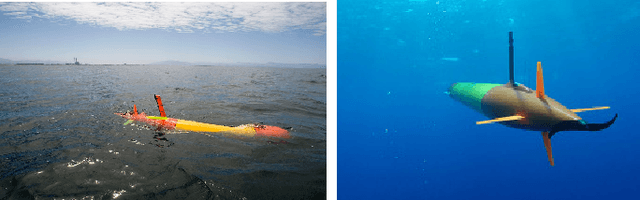

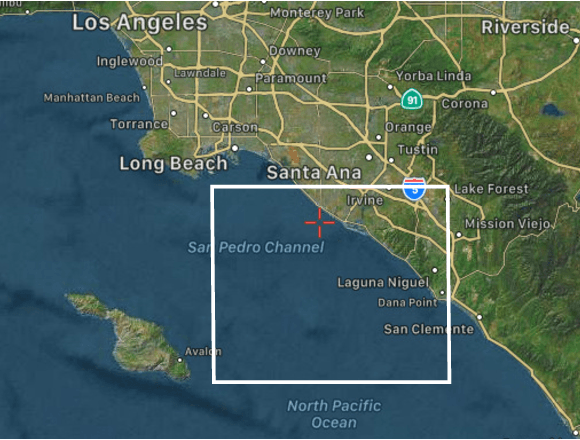
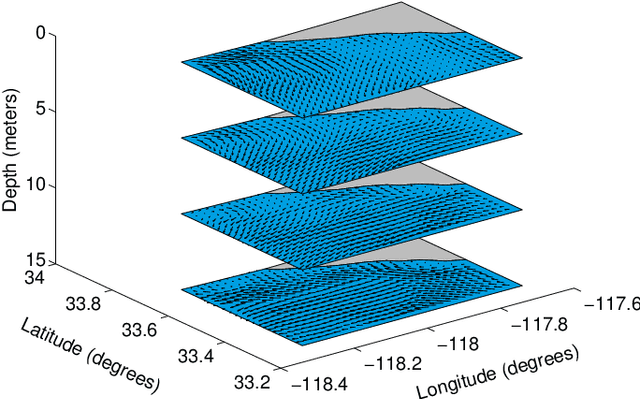
Ocean ecosystems have spatiotemporal variability and dynamic complexity that require a long-term deployment of an autonomous underwater vehicle for data collection. A new long-range autonomous underwater vehicle called Tethys is adapted to study different oceanic phenomena. Additionally, an ocean environment has external forces and moments along with changing water currents which are generally not considered in a vehicle kinematic model. In this scenario, it is not enough to generate a simple trajectory from an initial location to a goal location in an uncertain ocean as the vehicle can deviate from its intended trajectory. As such, we propose to compute a feedback plan that adapts the vehicle trajectory in the presence of any modeled or unmodeled uncertainties. In this work, we present a feedback motion planning method for the Tethys vehicle by combining a predictive ocean model and its kinematic modeling. Given a goal location, the Tethys kinematic model, and the water flow pattern, our method computes a feedback plan for the vehicle in a dynamic ocean environment that reduces its energy consumption. The computed feedback plan provides the optimal action for the Tethys vehicle to take from any location of the environment to reach the goal location considering its orientation. Our results based on actual ocean model prediction data demonstrate the applicability of our method.