 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogic-Driven Semantic Communication for Resilient Multi-Agent Systems
Jan 11, 2026The advent of 6G networks is accelerating autonomy and intelligence in large-scale, decentralized multi-agent systems (MAS). While this evolution enables adaptive behavior, it also heightens vulnerability to stressors such as environmental changes and adversarial behavior. Existing literature on resilience in decentralized MAS largely focuses on isolated aspects, such as fault tolerance, without offering a principled unified definition of multi-agent resilience. This gap limits the ability to design systems that can continuously sense, adapt, and recover under dynamic conditions. This article proposes a formal definition of MAS resilience grounded in two complementary dimensions: epistemic resilience, wherein agents recover and sustain accurate knowledge of the environment, and action resilience, wherein agents leverage that knowledge to coordinate and sustain goals under disruptions. We formalize resilience via temporal epistemic logic and quantify it using recoverability time (how quickly desired properties are re-established after a disturbance) and durability time (how long accurate beliefs and goal-directed behavior are sustained after recovery). We design an agent architecture and develop decentralized algorithms to achieve both epistemic and action resilience. We provide formal verification guarantees, showing that our specifications are sound with respect to the metric bounds and admit finite-horizon verification, enabling design-time certification and lightweight runtime monitoring. Through a case study on distributed multi-agent decision-making under stressors, we show that our approach outperforms baseline methods. Our formal verification analysis and simulation results highlight that the proposed framework enables resilient, knowledge-driven decision-making and sustained operation, laying the groundwork for resilient decentralized MAS in next-generation communication systems.
An Internal Model Principle For Robots
Jun 17, 2024When designing a robot's internal system, one often makes assumptions about the structure of the intended environment of the robot. One may even assign meaning to various internal components of the robot in terms of expected environmental correlates. In this paper we want to make the distinction between robot's internal and external worlds clear-cut. Can the robot learn about its environment, relying only on internally available information, including the sensor data? Are there mathematical conditions on the internal robot system which can be internally verified and make the robot's internal system mirror the structure of the environment? We prove that sufficiency is such a mathematical principle, and mathematically describe the emergence of the robot's internal structure isomorphic or bisimulation equivalent to that of the environment. A connection to the free-energy principle is established, when sufficiency is interpreted as a limit case of surprise minimization. As such, we show that surprise minimization leads to having an internal model isomorphic to the environment. This also parallels the Good Regulator Principle which states that controlling a system sufficiently well means having a model of it. Unlike the mentioned theories, ours is discrete, and non-probabilistic.
BayGo: Joint Bayesian Learning and Information-Aware Graph Optimization
Nov 09, 2020
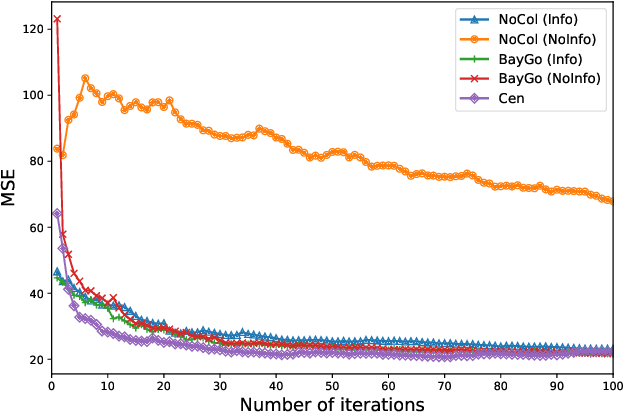
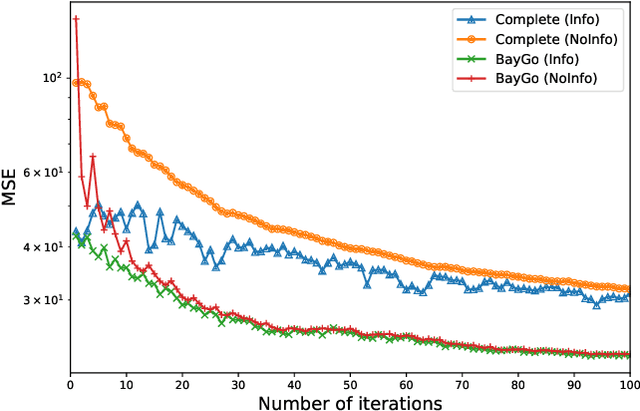
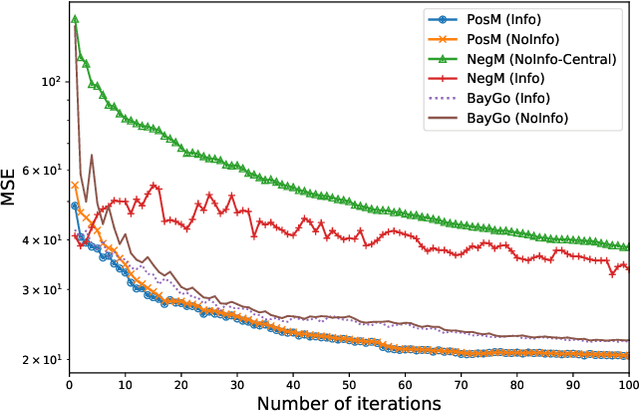
This article deals with the problem of distributed machine learning, in which agents update their models based on their local datasets, and aggregate the updated models collaboratively and in a fully decentralized manner. In this paper, we tackle the problem of information heterogeneity arising in multi-agent networks where the placement of informative agents plays a crucial role in the learning dynamics. Specifically, we propose BayGo, a novel fully decentralized joint Bayesian learning and graph optimization framework with proven fast convergence over a sparse graph. Under our framework, agents are able to learn and communicate with the most informative agent to their own learning. Unlike prior works, our framework assumes no prior knowledge of the data distribution across agents nor does it assume any knowledge of the true parameter of the system. The proposed alternating minimization based framework ensures global connectivity in a fully decentralized way while minimizing the number of communication links. We theoretically show that by optimizing the proposed objective function, the estimation error of the posterior probability distribution decreases exponentially at each iteration. Via extensive simulations, we show that our framework achieves faster convergence and higher accuracy compared to fully-connected and star topology graphs.