 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Meter Detection Methods for Automated Infrastructure Inspection
Apr 24, 2022
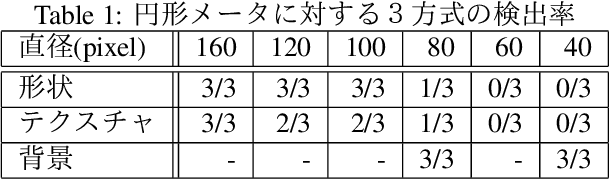
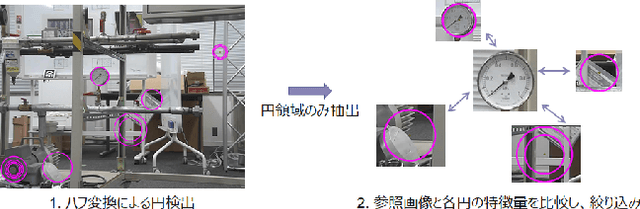
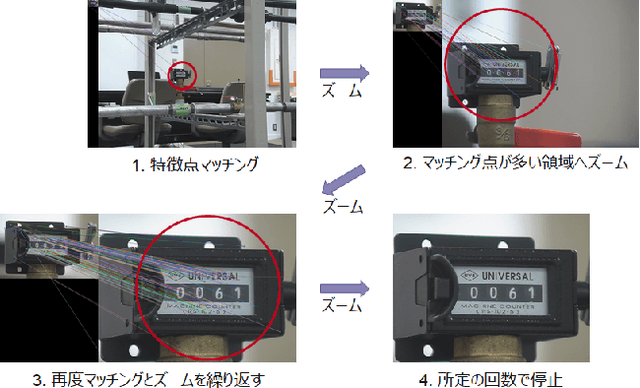
In order to read meter values from a camera on an autonomous inspection robot with positional errors, it is necessary to detect meter regions from the image. In this study, we developed shape-based, texture-based, and background information-based methods as meter area detection techniques and compared their effectiveness for meters of different shapes and sizes. As a result, we confirmed that the background information-based method can detect the farthest meters regardless of the shape and number of meters, and can stably detect meters with a diameter of 40px.
Attributes' Importance for Zero-Shot Pose-Classification Based on Wearable Sensors
Aug 02, 2018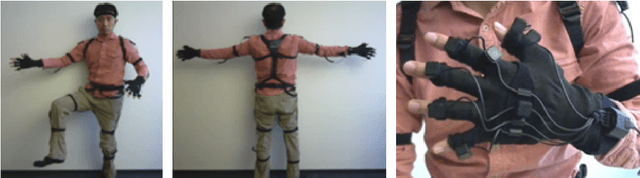
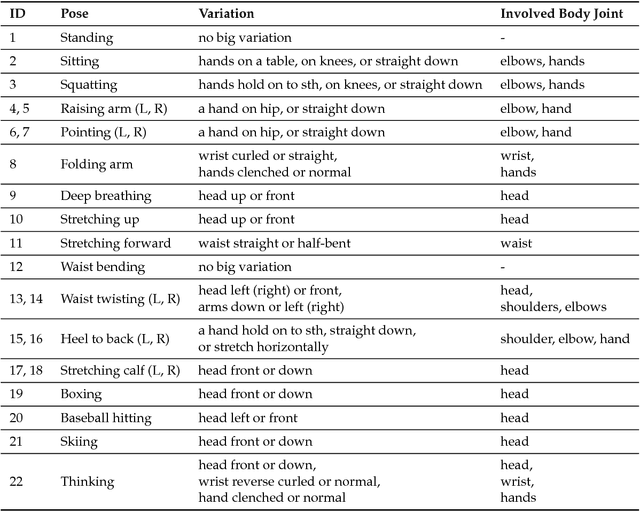
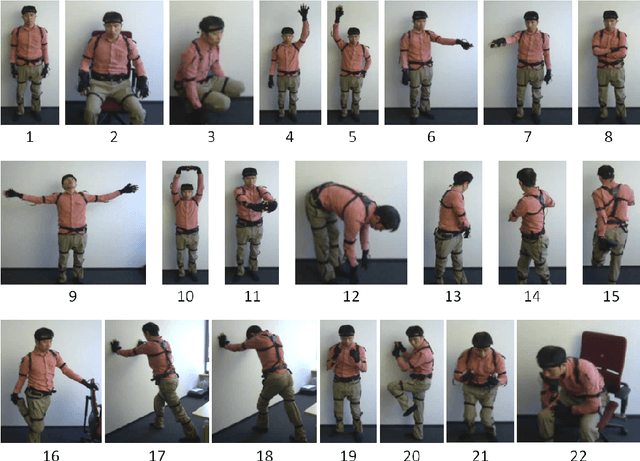
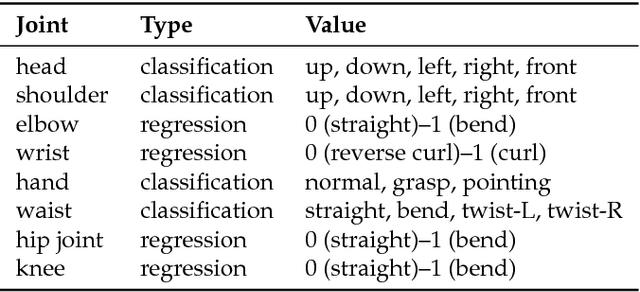
This paper presents a simple yet effective method for improving the performance of zero-shot learning (ZSL). ZSL classifies instances of unseen classes, from which no training data is available, by utilizing the attributes of the classes. Conventional ZSL methods have equally dealt with all the available attributes, but this sometimes causes misclassification. This is because an attribute that is effective for classifying instances of one class is not always effective for another class. In this case, a metric of classifying the latter class can be undesirably influenced by the irrelevant attribute. This paper solves this problem by taking the importance of each attribute for each class into account when calculating the metric. In addition to the proposal of this new method, this paper also contributes by providing a dataset for pose classification based on wearable sensors, named HDPoseDS. It contains 22 classes of poses performed by 10 subjects with 31 IMU sensors across full body. To the best of our knowledge, it is the richest wearable-sensor dataset especially in terms of sensor density, and thus it is suitable for studying zero-shot pose/action recognition. The presented method was evaluated on HDPoseDS and outperformed relative improvement of 5.9% in comparison to the best baseline method.
* The paper was published at Sensors, an open access journal (http://www.mdpi.com/1424-8220/18/8/2485). This article belongs to the Special Issue Artificial Intelligence and Machine Learning in Sensors Networks