 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoLaparo: A New Dataset of Integrated Multi-tasks for Image-guided Surgical Automation in Laparoscopic Hysterectomy
Aug 03, 2022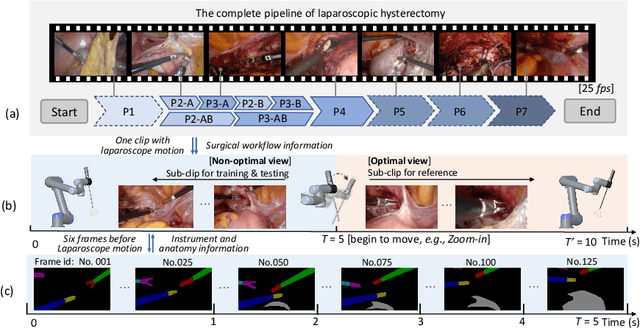


Computer-assisted minimally invasive surgery has great potential in benefiting modern operating theatres. The video data streamed from the endoscope provides rich information to support context-awareness for next-generation intelligent surgical systems. To achieve accurate perception and automatic manipulation during the procedure, learning based technique is a promising way, which enables advanced image analysis and scene understanding in recent years. However, learning such models highly relies on large-scale, high-quality, and multi-task labelled data. This is currently a bottleneck for the topic, as available public dataset is still extremely limited in the field of CAI. In this paper, we present and release the first integrated dataset (named AutoLaparo) with multiple image-based perception tasks to facilitate learning-based automation in hysterectomy surgery. Our AutoLaparo dataset is developed based on full-length videos of entire hysterectomy procedures. Specifically, three different yet highly correlated tasks are formulated in the dataset, including surgical workflow recognition, laparoscope motion prediction, and instrument and key anatomy segmentation. In addition, we provide experimental results with state-of-the-art models as reference benchmarks for further model developments and evaluations on this dataset. The dataset is available at https://autolaparo.github.io.