 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Posterior Samples for Bayesian Optimization via Rootfinding
Oct 29, 2024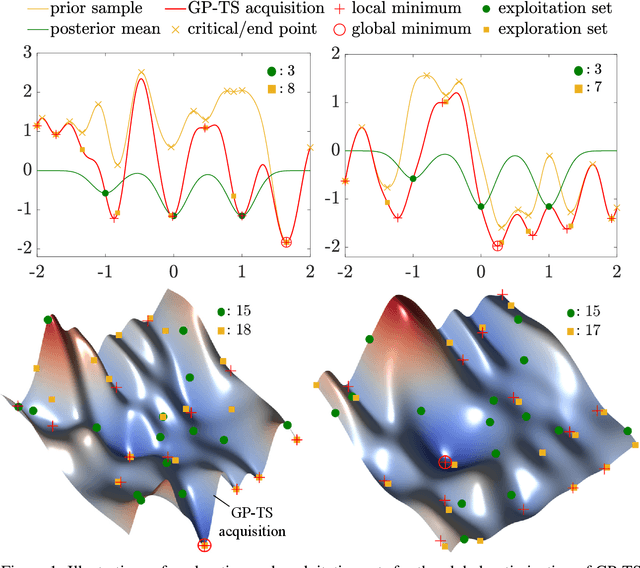
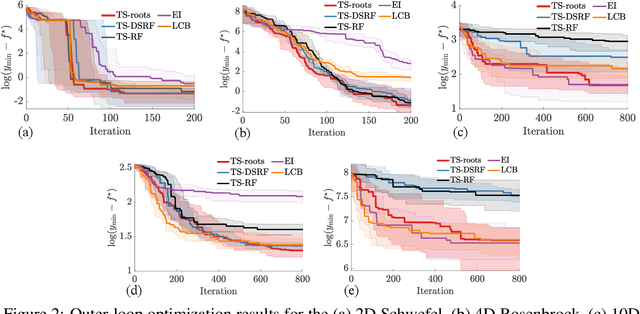
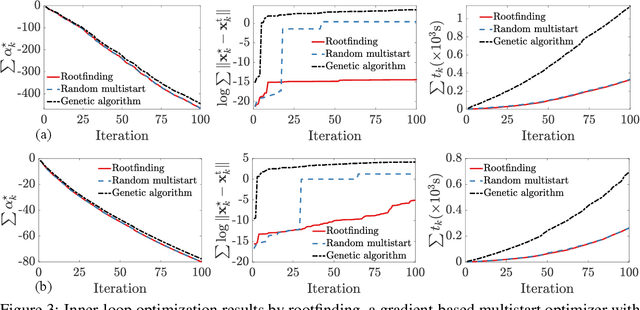
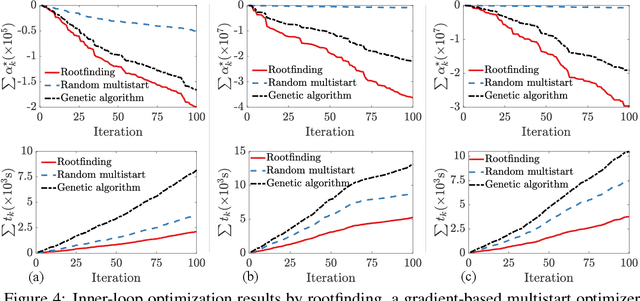
Bayesian optimization devolves the global optimization of a costly objective function to the global optimization of a sequence of acquisition functions. This inner-loop optimization can be catastrophically difficult if it involves posterior samples, especially in higher dimensions. We introduce an efficient global optimization strategy for posterior samples based on global rootfinding. It provides gradient-based optimizers with judiciously selected starting points, designed to combine exploitation and exploration. The algorithm scales practically linearly to high dimensions. For posterior sample-based acquisition functions such as Gaussian process Thompson sampling (GP-TS) and variants of entropy search, we demonstrate remarkable improvement in both inner- and outer-loop optimization, surprisingly outperforming alternatives like EI and GP-UCB in most cases. We also propose a sample-average formulation of GP-TS, which has a parameter to explicitly control exploitation and can be computed at the cost of one posterior sample. Our implementation is available at https://github.com/UQUH/TSRoots .
Gaussian Process Thompson Sampling via Rootfinding
Oct 10, 2024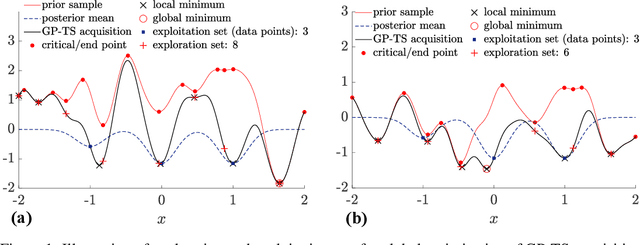
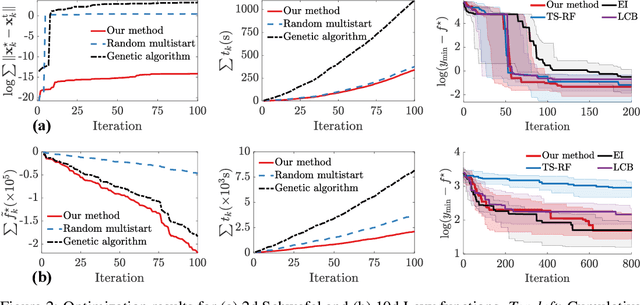
Thompson sampling (TS) is a simple, effective stochastic policy in Bayesian decision making. It samples the posterior belief about the reward profile and optimizes the sample to obtain a candidate decision. In continuous optimization, the posterior of the objective function is often a Gaussian process (GP), whose sample paths have numerous local optima, making their global optimization challenging. In this work, we introduce an efficient global optimization strategy for GP-TS that carefully selects starting points for gradient-based multi-start optimizers. It identifies all local optima of the prior sample via univariate global rootfinding, and optimizes the posterior sample using a differentiable, decoupled representation. We demonstrate remarkable improvement in the global optimization of GP posterior samples, especially in high dimensions. This leads to dramatic improvements in the overall performance of Bayesian optimization using GP-TS acquisition functions, surprisingly outperforming alternatives like GP-UCB and EI.
Digital Twins and Civil Engineering Phases: Reorienting Adoption Strategies
Mar 04, 2024



Digital twin (DT) technology has received immense attention over the years due to the promises it presents to various stakeholders in science and engineering. As a result, different thematic areas of DT have been explored. This is no different in specific fields such as manufacturing, automation, oil and gas, and civil engineering, leading to fragmented approaches for field-specific applications. The civil engineering industry is further disadvantaged in this regard as it relies on external techniques by other engineering fields for its DT adoption. A rising consequence of these extensions is a concentrated application of DT to the operations and maintenance phase. On another spectrum, Building Information Modeling (BIM) are pervasively utilized in the planning/design phase, and the transient nature of the construction phase remains a challenge for its DT adoption. In this paper, we present a phase-based development of DT in the Architecture, Engineering, and Construction industry. We commence by presenting succinct expositions on DT as a concept and as a service and establish a five-level scale system. Furthermore, we present separately a systematic literature review of the conventional techniques employed at each civil engineering phase. In this regard, we identified enabling technologies such as computer vision for extended sensing and the Internet of Things for reliable integration. Ultimately, we attempt to reveal DT as an important tool across the entire life cycle of civil engineering projects and nudge researchers to think more holistically in their quest for the integration of DT for civil engineering applications.