 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePipe Routing with Topology Control for UAV Networks
May 07, 2024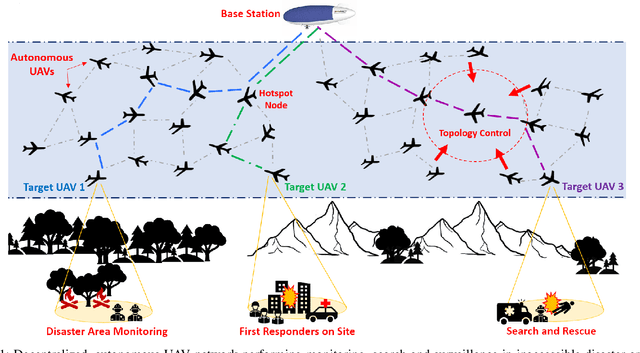
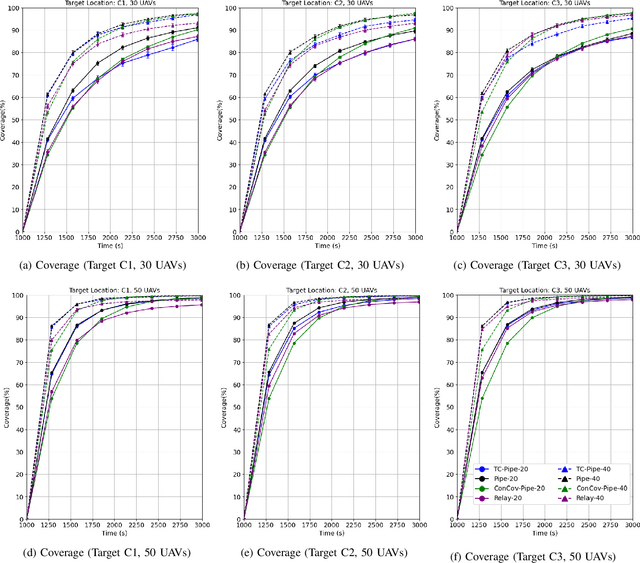
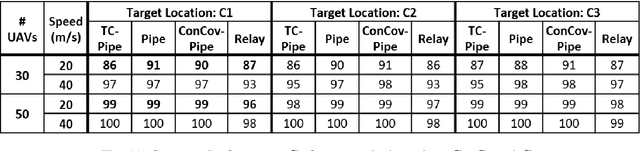
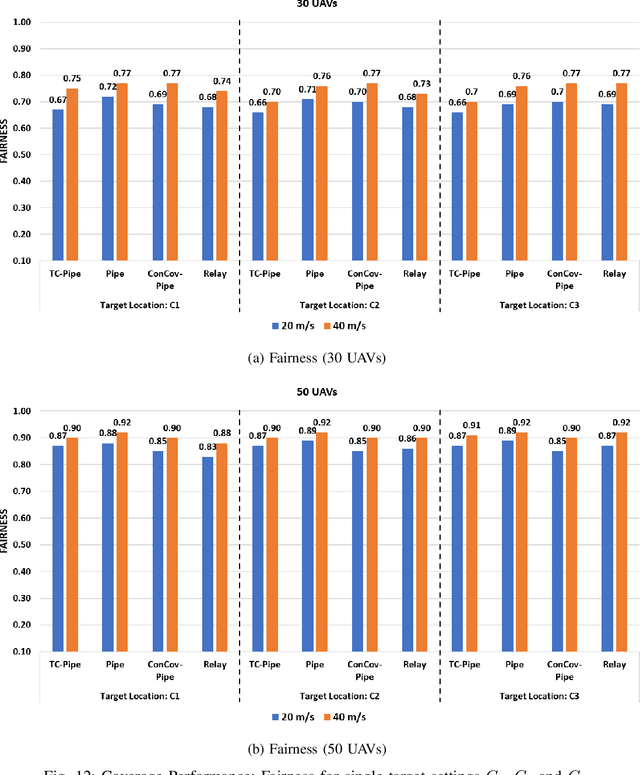
Routing protocols help in transmitting the sensed data from UAVs monitoring the targets (called target UAVs) to the BS. However, the highly dynamic nature of an autonomous, decentralized UAV network leads to frequent route breaks or traffic disruptions. Traditional routing schemes cannot quickly adapt to dynamic UAV networks and/or incur large control overhead and delays. To establish stable, high-quality routes from target UAVs to the BS, we design a hybrid reactive routing scheme called pipe routing that is mobility, congestion, and energy-aware. The pipe routing scheme discovers routes on-demand and proactively switches to alternate high-quality routes within a limited region around the active routes (called the pipe) when needed, reducing the number of route breaks and increasing data throughput. We then design a novel topology control-based pipe routing scheme to maintain robust connectivity in the pipe region around the active routes, leading to improved route stability and increased throughput with minimal impact on the coverage performance of the UAV network.
Asynchronous Distributed Coordinated Hybrid Precoding in Multi-cell mmWave Wireless Networks
Feb 13, 2024



Asynchronous distributed hybrid beamformers (ADBF) are conceived for minimizing the total transmit power subject to signal-to-interference-plus-noise ratio (SINR) constraints at the users. Our design requires only limited information exchange between the base stations (BSs) of the mmWave multi-cell coordinated (MCC) networks considered. To begin with, a semidefinite relaxation (SDR)-based fully-digital (FD) beamformer is designed for a centralized MCC system. Subsequently, a Bayesian learning (BL) technique is harnessed for decomposing the FD beamformer into its analog and baseband components and construct a hybrid transmit precoder (TPC). However, the centralized TPC design requires global channel state information (CSI), hence it results in a high signaling overhead. An alternating direction based method of multipliers (ADMM) technique is developed for a synchronous distributed beamformer (SDBF) design, which relies only on limited information exchange among the BSs, thus reducing the signaling overheads required by the centralized TPC design procedure. However, the SDBF design is challenging, since it requires the updates from the BSs to be strictly synchronized. As a remedy, an ADBF framework is developed that mitigates the inter-cell interference (ICI) and also control the asynchrony in the system. Furthermore, the above ADBF framework is also extended to the robust ADBF (R-ADBF) algorithm that incorporates the CSI uncertainty into the design procedure for minimizing the the worst-case transmit power. Our simulation results illustrate both the enhanced performance and the improved convergence properties of the ADMM-based ADBF and R-ADBF schemes.
A Deep Q-Learning based, Base-Station Connectivity-Aware, Decentralized Pheromone Mobility Model for Autonomous UAV Networks
Nov 28, 2023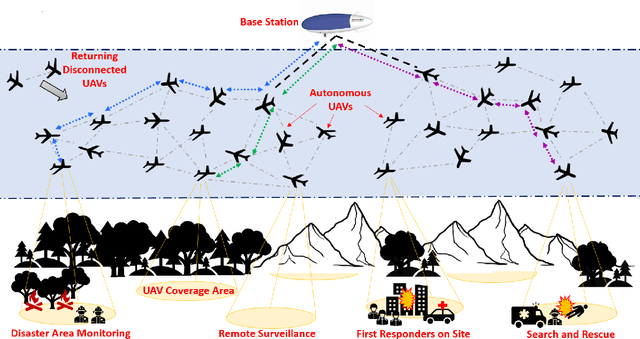
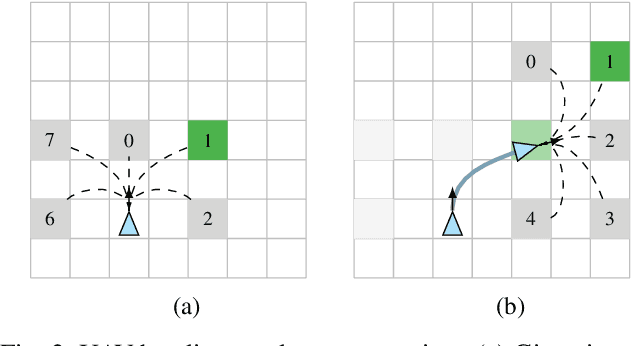
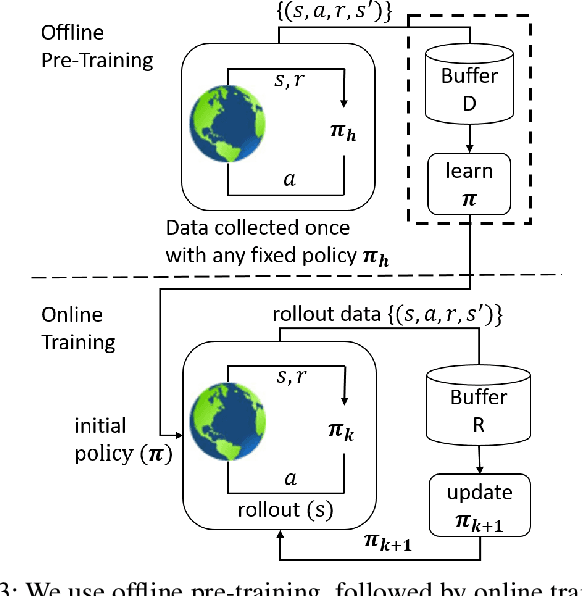
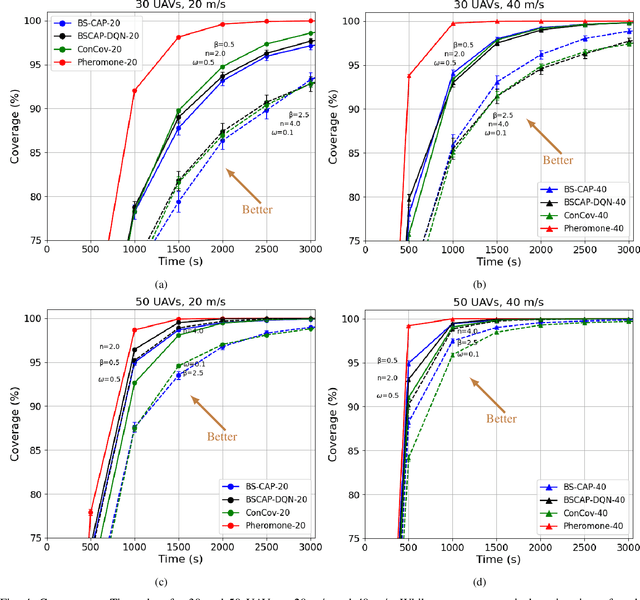
UAV networks consisting of low SWaP (size, weight, and power), fixed-wing UAVs are used in many applications, including area monitoring, search and rescue, surveillance, and tracking. Performing these operations efficiently requires a scalable, decentralized, autonomous UAV network architecture with high network connectivity. Whereas fast area coverage is needed for quickly sensing the area, strong node degree and base station (BS) connectivity are needed for UAV control and coordination and for transmitting sensed information to the BS in real time. However, the area coverage and connectivity exhibit a fundamental trade-off: maintaining connectivity restricts the UAVs' ability to explore. In this paper, we first present a node degree and BS connectivity-aware distributed pheromone (BS-CAP) mobility model to autonomously coordinate the UAV movements in a decentralized UAV network. This model maintains a desired connectivity among 1-hop neighbors and to the BS while achieving fast area coverage. Next, we propose a deep Q-learning policy based BS-CAP model (BSCAP-DQN) to further tune and improve the coverage and connectivity trade-off. Since it is not practical to know the complete topology of such a network in real time, the proposed mobility models work online, are fully distributed, and rely on neighborhood information. Our simulations demonstrate that both proposed models achieve efficient area coverage and desired node degree and BS connectivity, improving significantly over existing schemes.
A CNN-LSTM-based hybrid deep learning approach to detect sentiment polarities on Monkeypox tweets
Aug 25, 2022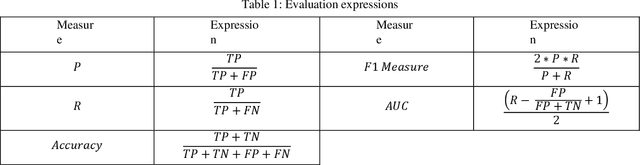
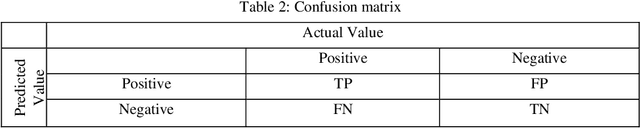
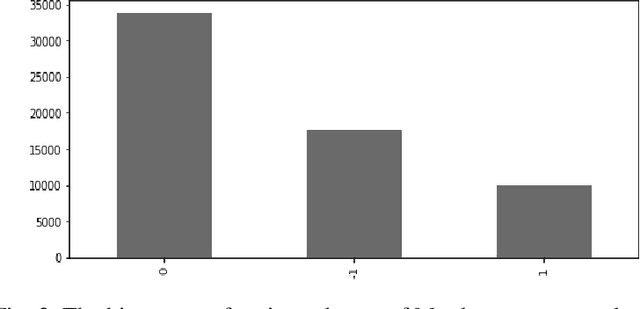

People have recently begun communicating their thoughts and viewpoints through user-generated multimedia material on social networking websites. This information can be images, text, videos, or audio. Recent years have seen a rise in the frequency of occurrence of this pattern. Twitter is one of the most extensively utilized social media sites, and it is also one of the finest locations to get a sense of how people feel about events that are linked to the Monkeypox sickness. This is because tweets on Twitter are shortened and often updated, both of which contribute to the platform's character. The fundamental objective of this study is to get a deeper comprehension of the diverse range of reactions people have in response to the presence of this condition. This study focuses on finding out what individuals think about monkeypox illnesses, which presents a hybrid technique based on CNN and LSTM. We have considered all three possible polarities of a user's tweet: positive, negative, and neutral. An architecture built on CNN and LSTM is utilized to determine how accurate the prediction models are. The recommended model's accuracy was 94% on the monkeypox tweet dataset. Other performance metrics such as accuracy, recall, and F1-score were utilized to test our models and results in the most time and resource-effective manner. The findings are then compared to more traditional approaches to machine learning. The findings of this research contribute to an increased awareness of the monkeypox infection in the general population.
Accurate Link Lifetime Computation in Autonomous Airborne UAV Networks
Jan 31, 2022


An autonomous airborne network (AN) consists of multiple unmanned aerial vehicles (UAVs), which can self-configure to provide seamless, low-cost and secure connectivity. AN is preferred for applications in civilian and military sectors because it can improve the network reliability and fault tolerance, reduce mission completion time through collaboration, and adapt to dynamic mission requirements. However, facilitating seamless communication in such ANs is a challenging task due to their fast node mobility, which results in frequent link disruptions. Many existing AN-specific mobility-aware schemes restrictively assume that UAVs fly in straight lines, to reduce the high uncertainty in the mobility pattern and simplify the calculation of link lifetime (LLT). Here, LLT represents the duration after which the link between a node pair terminates. However, the application of such schemes is severely limited, which makes them unsuitable for practical autonomous ANs. In this report, a mathematical framework is described to accurately compute the \textit{LLT} value for a UAV node pair, where each node flies independently in a randomly selected smooth trajectory. In addition, the impact of random trajectory changes on LLT accuracy is also discussed.
Feasibility of Principal Component Analysis in hand gesture recognition system
Feb 23, 2017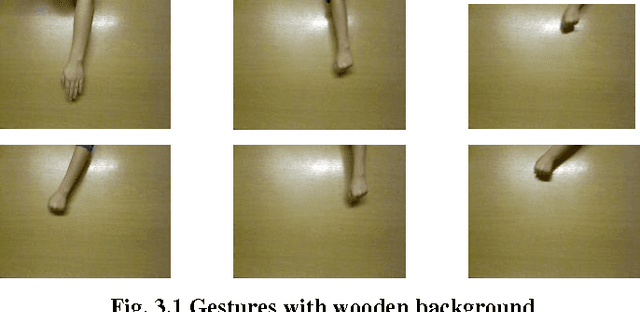
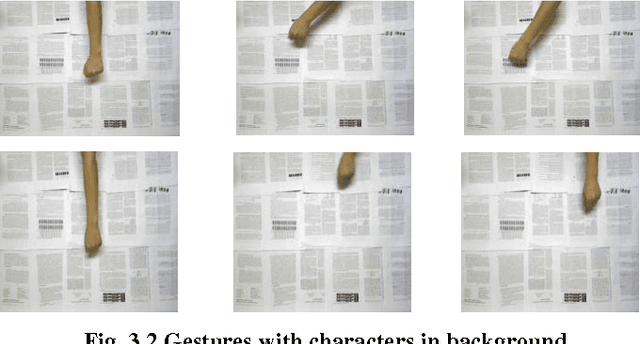


Nowadays actions are increasingly being handled in electronic ways, instead of physical interaction. From earlier times biometrics is used in the authentication of a person. It recognizes a person by using a human trait associated with it like eyes (by calculating the distance between the eyes) and using hand gestures, fingerprint detection, face detection etc. Advantages of using these traits for identification are that they uniquely identify a person and cannot be forgotten or lost. These are unique features of a human being which are being used widely to make the human life simpler. Hand gesture recognition system is a powerful tool that supports efficient interaction between the user and the computer. The main moto of hand gesture recognition research is to create a system which can recognise specific hand gestures and use them to convey useful information for device control. This paper presents an experimental study over the feasibility of principal component analysis in hand gesture recognition system. PCA is a powerful tool for analyzing data. The primary goal of PCA is dimensionality reduction. Frames are extracted from the Sheffield KInect Gesture (SKIG) dataset. The implementation is done by creating a training set and then training the recognizer. It uses Eigen space by processing the eigenvalues and eigenvectors of the images in training set. Euclidean distance with the threshold value is used as similarity metric to recognize the gestures. The experimental results show that PCA is feasible to be used for hand gesture recognition system.
A Fast Keypoint Based Hybrid Method for Copy Move Forgery Detection
Dec 11, 2016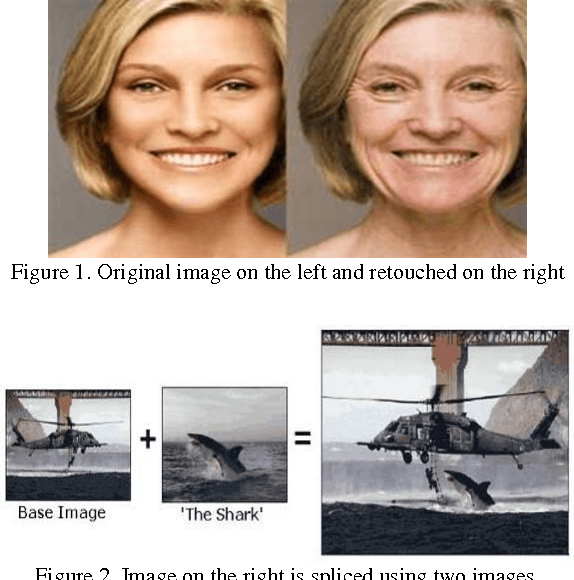
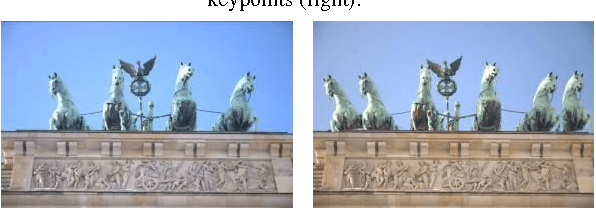
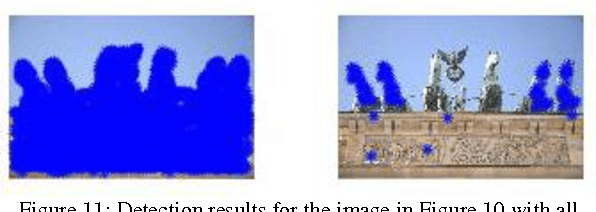
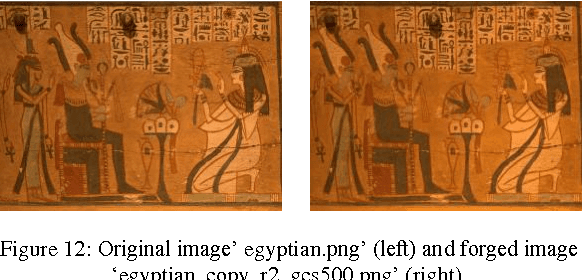
Copy move forgery detection in digital images has become a very popular research topic in the area of image forensics. Due to the availability of sophisticated image editing tools and ever increasing hardware capabilities, it has become an easy task to manipulate the digital images. Passive forgery detection techniques are more relevant as they can be applied without the prior information about the image in question. Block based techniques are used to detect copy move forgery, but have limitations of large time complexity and sensitivity against affine operations like rotation and scaling. Keypoint based approaches are used to detect forgery in large images where the possibility of significant post processing operations like rotation and scaling is more. A hybrid approach is proposed using different methods for keypoint detection and description. Speeded Up Robust Features (SURF) are used to detect the keypoints in the image and Binary Robust Invariant Scalable Keypoints (BRISK) features are used to describe features at these keypoints. The proposed method has performed better than the existing forgery detection method using SURF significantly in terms of detection speed and is invariant to post processing operations like rotation and scaling. The proposed method is also invariant to other commonly applied post processing operations like adding Gaussian noise and JPEG compression
A Hybrid Approach for Improved Content-based Image Retrieval using Segmentation
Feb 11, 2015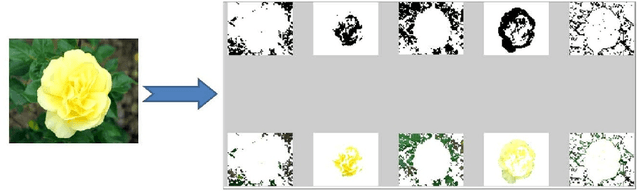


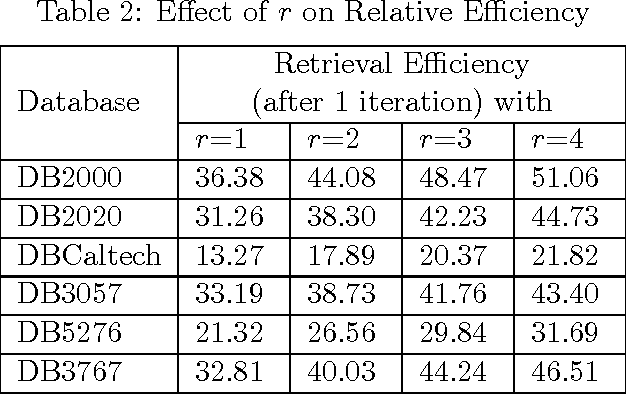
The objective of Content-Based Image Retrieval (CBIR) methods is essentially to extract, from large (image) databases, a specified number of images similar in visual and semantic content to a so-called query image. To bridge the semantic gap that exists between the representation of an image by low-level features (namely, colour, shape, texture) and its high-level semantic content as perceived by humans, CBIR systems typically make use of the relevance feedback (RF) mechanism. RF iteratively incorporates user-given inputs regarding the relevance of retrieved images, to improve retrieval efficiency. One approach is to vary the weights of the features dynamically via feature reweighting. In this work, an attempt has been made to improve retrieval accuracy by enhancing a CBIR system based on color features alone, through implicit incorporation of shape information obtained through prior segmentation of the images. Novel schemes for feature reweighting as well as for initialization of the relevant set for improved relevance feedback, have also been proposed for boosting performance of RF- based CBIR. At the same time, new measures for evaluation of retrieval accuracy have been suggested, to overcome the limitations of existing measures in the RF context. Results of extensive experiments have been presented to illustrate the effectiveness of the proposed approaches.