 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-layer Kernel Ridge Regression for One-class Classification
Jun 01, 2018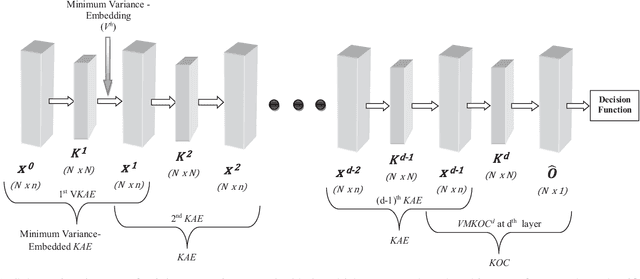

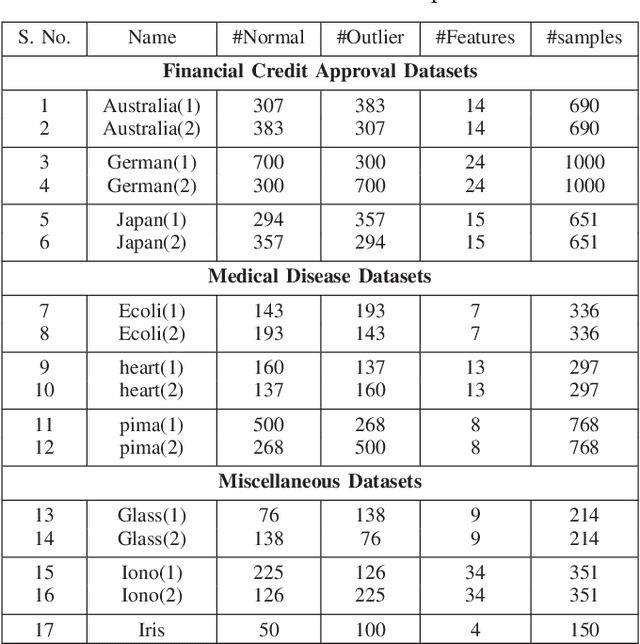
In this paper, a multi-layer architecture (in a hierarchical fashion) by stacking various Kernel Ridge Regression (KRR) based Auto-Encoder for one-class classification is proposed and is referred as MKOC. MKOC has many layers of Auto-Encoders to project the input features into new feature space and the last layer was regression based one class classifier. The Auto-Encoders use an unsupervised approach of learning and the final layer uses semi-supervised (trained by only positive samples) approach of learning. The proposed MKOC is experimentally evaluated on 15 publicly available benchmark datasets. Experimental results verify the effectiveness of the proposed approach over 11 existing state-of-the-art kernel-based one-class classifiers. Friedman test is also performed to verify the statistical significance of the claim of the superiority of the proposed one-class classifiers over the existing state-of-the-art methods.
Online Learning with Regularized Kernel for One-class Classification
Apr 09, 2018
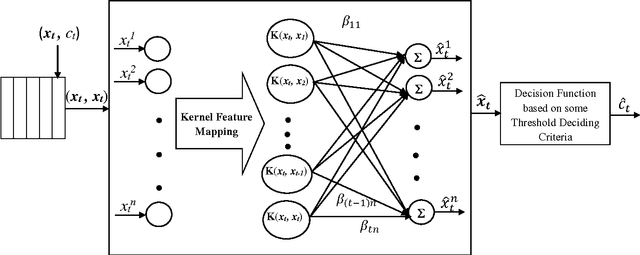

This paper presents an online learning with regularized kernel based one-class extreme learning machine (ELM) classifier and is referred as online RK-OC-ELM. The baseline kernel hyperplane model considers whole data in a single chunk with regularized ELM approach for offline learning in case of one-class classification (OCC). Further, the basic hyper plane model is adapted in an online fashion from stream of training samples in this paper. Two frameworks viz., boundary and reconstruction are presented to detect the target class in online RKOC-ELM. Boundary framework based one-class classifier consists of single node output architecture and classifier endeavors to approximate all data to any real number. However, one-class classifier based on reconstruction framework is an autoencoder architecture, where output nodes are identical to input nodes and classifier endeavor to reconstruct input layer at the output layer. Both these frameworks employ regularized kernel ELM based online learning and consistency based model selection has been employed to select learning algorithm parameters. The performance of online RK-OC-ELM has been evaluated on standard benchmark datasets as well as on artificial datasets and the results are compared with existing state-of-the art one-class classifiers. The results indicate that the online learning one-class classifier is slightly better or same as batch learning based approaches. As, base classifier used for the proposed classifiers are based on the ELM, hence, proposed classifiers would also inherit the benefit of the base classifier i.e. it will perform faster computation compared to traditional autoencoder based one-class classifier.
An Integrated Decision and Control Theoretic Solution to Multi-Agent Co-Operative Search Problems
Mar 11, 2018



This paper considers the problem of autonomous multi-agent cooperative target search in an unknown environment using a decentralized framework under a no-communication scenario. The targets are considered as static targets and the agents are considered to be homogeneous. The no-communication scenario translates as the agents do not exchange either the information about the environment or their actions among themselves. We propose an integrated decision and control theoretic solution for a search problem which generates feasible agent trajectories. In particular, a perception based algorithm is proposed which allows an agent to estimate the probable strategies of other agents' and to choose a decision based on such estimation. The algorithm shows robustness with respect to the estimation accuracy to a certain degree. The performance of the algorithm is compared with random strategies and numerical simulation shows considerable advantages.
Asymptotic Optimality of Rapidly Exploring Random Tree
Jul 13, 2017

In this paper we investigate the asymptotic optimality property of a randomized sampling based motion planner, namely RRT. We prove that a RRT planner is not an asymptotically optimal motion planner. Our result, while being consistent with similar results which exist in the literature, however, brings out an important characteristics of a RRT planner. We show that the degree distribution of the tree vertices follows a power law in an asymptotic sense. A simulation result is presented to support the theoretical claim. Based on these results we also try to establish a simple necessary condition for sampling based motion planners to be asymptotically optimal.