 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Analysis of Spatial and Temporal Learning Networks in the Presence of DVL Noise
Mar 07, 2025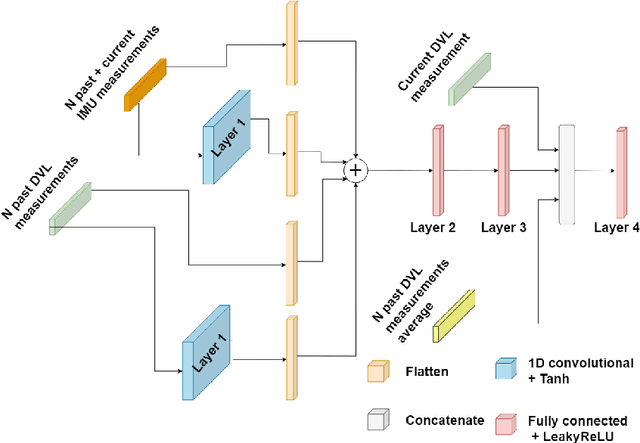
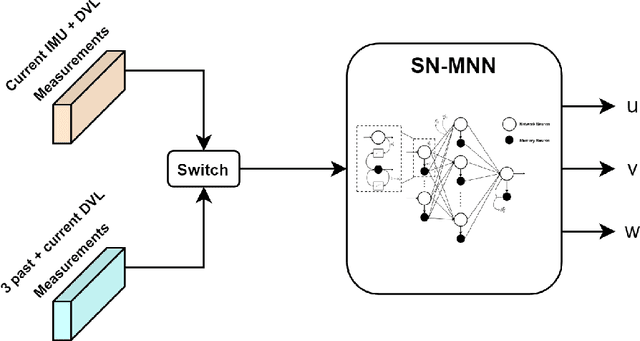
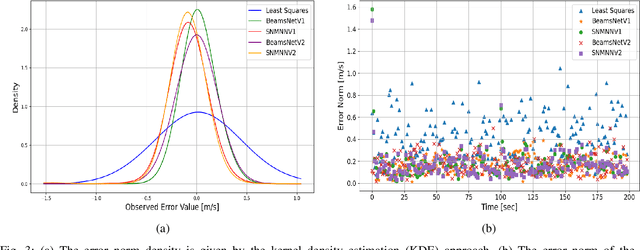
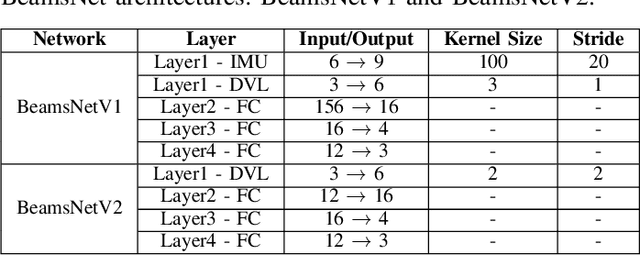
Navigation is a critical aspect of autonomous underwater vehicles (AUVs) operating in complex underwater environments. Since global navigation satellite system (GNSS) signals are unavailable underwater, navigation relies on inertial sensing, which tends to accumulate errors over time. To mitigate this, the Doppler velocity log (DVL) plays a crucial role in determining navigation accuracy. In this paper, we compare two neural network models: an adapted version of BeamsNet, based on a one-dimensional convolutional neural network, and a Spectrally Normalized Memory Neural Network (SNMNN). The former focuses on extracting spatial features, while the latter leverages memory and temporal features to provide more accurate velocity estimates while handling biased and noisy DVL data. The proposed approaches were trained and tested on real AUV data collected in the Mediterranean Sea. Both models are evaluated in terms of accuracy and estimation certainty and are benchmarked against the least squares (LS) method, the current model-based approach. The results show that the neural network models achieve over a 50% improvement in RMSE for the estimation of the AUV velocity, with a smaller standard deviation.