 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAANI: Capturing the language landscape for an inclusive digital India
Mar 31, 2026Project VAANI is an initiative to create an India-representative multi-modal dataset that comprehensively maps India's linguistic diversity, starting with 165 districts across the country in its first two phases. Speech data is collected through a carefully structured process that uses image-based prompts to encourage spontaneous responses. Images are captured through a separate process that encompasses a broad range of topics, gathered from both within and across districts. The collected data undergoes a rigorous multi-stage quality evaluation, including both automated and manual checks to ensure highest possible standards in audio quality and transcription accuracy. Following this thorough validation, we have open-sourced around 289K images, approximately 31,270 hours of audio recordings, and around 2,067 hours of transcribed speech, encompassing 112 languages from 165 districts from 31 States and Union territories. Notably, significant of these languages are being represented for the first time in a dataset of this scale, making the VAANI project a groundbreaking effort in preserving and promoting linguistic inclusivity. This data can be instrumental in building inclusive speech models for India, and in advancing research and development across speech, image, and multimodal applications.
Exploring parameter-efficient fine-tuning (PEFT) of billion-parameter vision models with QLoRA and DoRA: insights into generalization for limited-data image classification under a 98:1 test-to-train regime
Mar 18, 2026Automated behavior classification is essential for precision livestock farming but faces challenges of high computational costs and limited labeled data. This study systematically compared three approaches: training from scratch (ResNet-18, ViT-Small), frozen feature extraction, and parameter-efficient fine-tuning (PEFT) of the DINOv3 foundation model (6.7 billion parameters). We evaluated QLoRA and DoRA across multiple configurations varying rank (8, 16, 64) and target modules (q_proj versus all-linear layers). With 2,160 verified training images, we assessed generalization of our model on 211,800 test samples, which is essentially a 98:1 test-to-train ratio. Results demonstrated that PEFT substantially outperformed alternatives, where the best QLoRA configuration (all-linear layers and rank=64) achieved 83.16% test accuracy with only 2.72% parameters (183.0M) in 5.8 hours, compared to 72.87% for ResNet-18 (16.8 hours), 61.91% for ViT-Small (18.7 hours), and 76.56% for frozen DINOv3 (17.5 hours). DoRA achieved comparable accuracy (83.14%) but with longer training time (11.0 hours). Notably, increasing adapter capacity consistently improved generalization while simultaneously not causing overfitting: reducing rank from 16 to 8 decreased test accuracy from 78.38% to 77.17%, while expanding from q_proj-only to all-linear layers with rank=64 improved accuracy from 78.38% to 83.16%. This suggests underfitting, instead of overfitting, is the primary challenge when adapting foundation models to agricultural imagery. Our findings provide guidelines for deploying billion-parameter vision models with PEFT in agricultural livestock applications.
Light Field Super-Resolution: A Critical Review on Challenges and Opportunities
Oct 09, 2025Advances in portability and low cost of plenoptic cameras have revived interest in light field imaging. Light-field imaging has evolved into a technology that enables us to capture richer visual information. This high-dimensional representation of visual data provides a powerful way to understand the scene, with remarkable improvement in traditional computer vision problems such as depth sensing , post-capture refocusing , material classification, segmentation, and video stabilization. Capturing light fields with high spatial-angular resolution and capturing light field video at high frame rates remains a major challenge due to the limited resolution of the sensors, with limited processing speed. In this paper, we presented an extensive literature review of light field acquisition techniques, challenges associated with different capturing methodology and algorithms proposed for light-field super-resolution, in order to deal with spatial-angular resolution trade-off issue.
Performance of GPT-5 Frontier Models in Ophthalmology Question Answering
Aug 14, 2025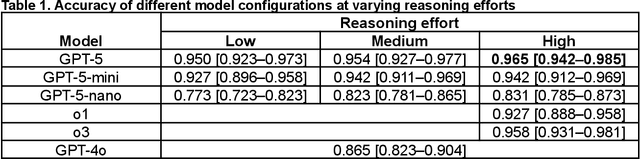
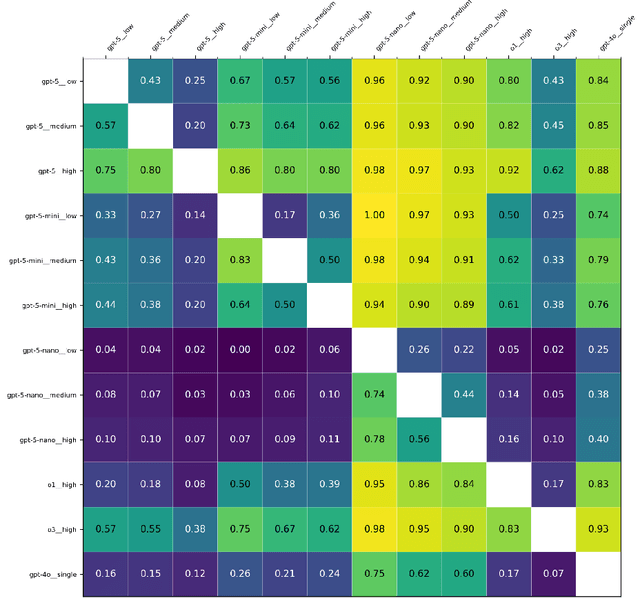
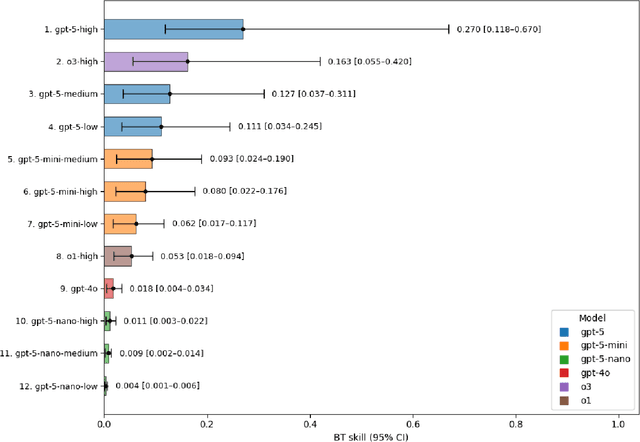
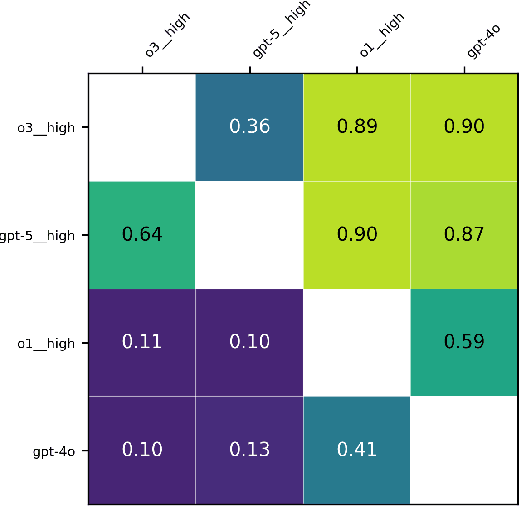
Large language models (LLMs) such as GPT-5 integrate advanced reasoning capabilities that may improve performance on complex medical question-answering tasks. For this latest generation of reasoning models, the configurations that maximize both accuracy and cost-efficiency have yet to be established. We evaluated 12 configurations of OpenAI's GPT-5 series (three model tiers across four reasoning effort settings) alongside o1-high, o3-high, and GPT-4o, using 260 closed-access multiple-choice questions from the American Academy of Ophthalmology Basic Clinical Science Course (BCSC) dataset. The primary outcome was multiple-choice accuracy; secondary outcomes included head-to-head ranking via a Bradley-Terry model, rationale quality assessment using a reference-anchored, pairwise LLM-as-a-judge framework, and analysis of accuracy-cost trade-offs using token-based cost estimates. GPT-5-high achieved the highest accuracy (0.965; 95% CI, 0.942-0.985), outperforming all GPT-5-nano variants (P < .001), o1-high (P = .04), and GPT-4o (P < .001), but not o3-high (0.958; 95% CI, 0.931-0.981). GPT-5-high ranked first in both accuracy (1.66x stronger than o3-high) and rationale quality (1.11x stronger than o3-high). Cost-accuracy analysis identified several GPT-5 configurations on the Pareto frontier, with GPT-5-mini-low offering the most favorable low-cost, high-performance balance. These results benchmark GPT-5 on a high-quality ophthalmology dataset, demonstrate the influence of reasoning effort on accuracy, and introduce an autograder framework for scalable evaluation of LLM-generated answers against reference standards in ophthalmology.
SPC to 3D: Novel View Synthesis from Binary SPC via I2I translation
Jun 07, 2025



Single Photon Avalanche Diodes (SPADs) represent a cutting-edge imaging technology, capable of detecting individual photons with remarkable timing precision. Building on this sensitivity, Single Photon Cameras (SPCs) enable image capture at exceptionally high speeds under both low and high illumination. Enabling 3D reconstruction and radiance field recovery from such SPC data holds significant promise. However, the binary nature of SPC images leads to severe information loss, particularly in texture and color, making traditional 3D synthesis techniques ineffective. To address this challenge, we propose a modular two-stage framework that converts binary SPC images into high-quality colorized novel views. The first stage performs image-to-image (I2I) translation using generative models such as Pix2PixHD, converting binary SPC inputs into plausible RGB representations. The second stage employs 3D scene reconstruction techniques like Neural Radiance Fields (NeRF) or Gaussian Splatting (3DGS) to generate novel views. We validate our two-stage pipeline (Pix2PixHD + Nerf/3DGS) through extensive qualitative and quantitative experiments, demonstrating significant improvements in perceptual quality and geometric consistency over the alternative baseline.
Transforming Single Photon Camera Images to Color High Dynamic Range Images
Dec 17, 2024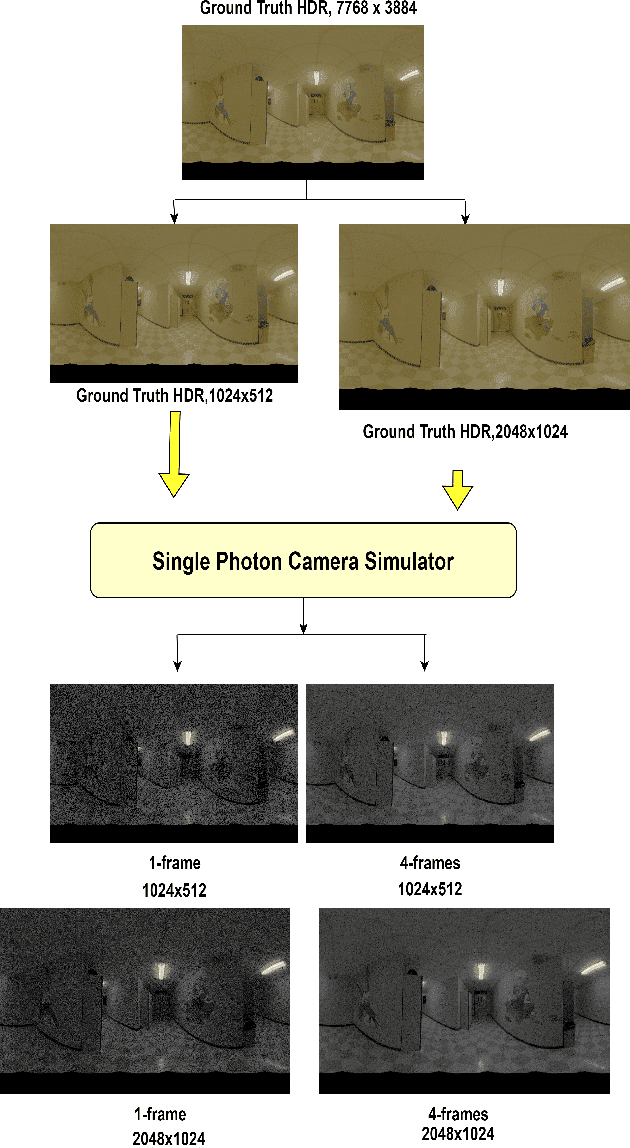


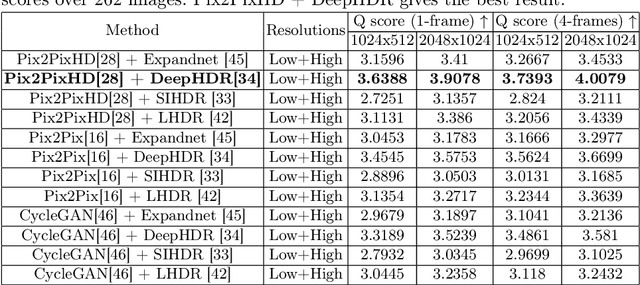
Traditional CMOS sensors suffer from restricted dynamic range and sub optimal performance under extreme lighting conditions. They are affected by electronic noise in low light conditions and pixel saturation while capturing high illumination. Recent High Dynamic Range (HDR) Imaging methods, often designed for CMOS Sensors, attempt to address these issues by fusing multiple exposures. However, they frequently introduce artifacts like ghosting and light flickering in dynamic scenarios and non-uniform signal-to-noise ratio in extreme dynamic range conditions. Recently, Single Photon Avalanche Diodes (SPADs), also known as Single Photon Camera (SPC) sensors, have surpassed CMOS sensors due to their capability to capture individual photons with high timing precision. Unlike traditional digital cameras that first convert light energy into analog electrical currents and then digitize them, SPAD sensors perform direct photon detection, making them less susceptible to extreme illumination conditions. Their distinctive non-linear response curve aids in capturing photons across both low-light and high-illumination environments, making them particularly effective for High Dynamic Range Imaging. Despite their advantages, images from SPAD Sensors are often noisy and visually unappealing. To address these challenges, we evaluate state-of-the-art architectures for converting monochromatic SPAD images into Color HDR images at various resolutions. Our evaluation involves both qualitative and quantitative assessments of these architectures, focusing on their effectiveness in each stage of the conversion process.
GN-FR:Generalizable Neural Radiance Fields for Flare Removal
Dec 11, 2024



Flare, an optical phenomenon resulting from unwanted scattering and reflections within a lens system, presents a significant challenge in imaging. The diverse patterns of flares, such as halos, streaks, color bleeding, and haze, complicate the flare removal process. Existing traditional and learning-based methods have exhibited limited efficacy due to their reliance on single-image approaches, where flare removal is highly ill-posed. We address this by framing flare removal as a multi-view image problem, taking advantage of the view-dependent nature of flare artifacts. This approach leverages information from neighboring views to recover details obscured by flare in individual images. Our proposed framework, GN-FR (Generalizable Neural Radiance Fields for Flare Removal), can render flare-free views from a sparse set of input images affected by lens flare and generalizes across different scenes in an unsupervised manner. GN-FR incorporates several modules within the Generalizable NeRF Transformer (GNT) framework: Flare-occupancy Mask Generation (FMG), View Sampler (VS), and Point Sampler (PS). To overcome the impracticality of capturing both flare-corrupted and flare-free data, we introduce a masking loss function that utilizes mask information in an unsupervised setting. Additionally, we present a 3D multi-view flare dataset, comprising 17 real flare scenes with 782 images, 80 real flare patterns, and their corresponding annotated flare-occupancy masks. To our knowledge, this is the first work to address flare removal within a Neural Radiance Fields (NeRF) framework.
MIS-ME: A Multi-modal Framework for Soil Moisture Estimation
Aug 02, 2024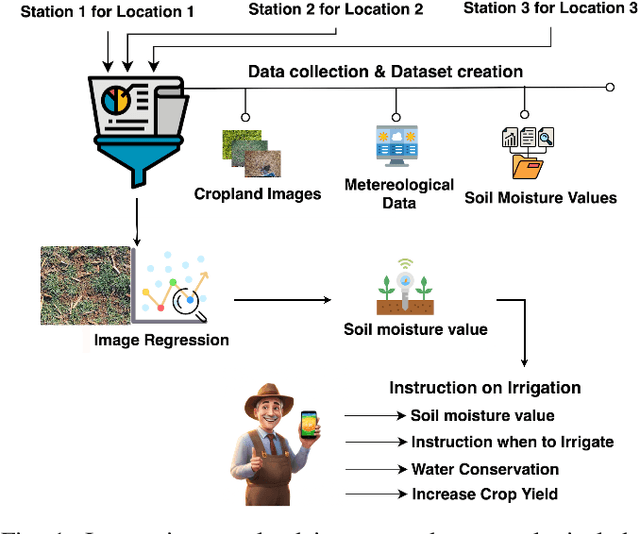
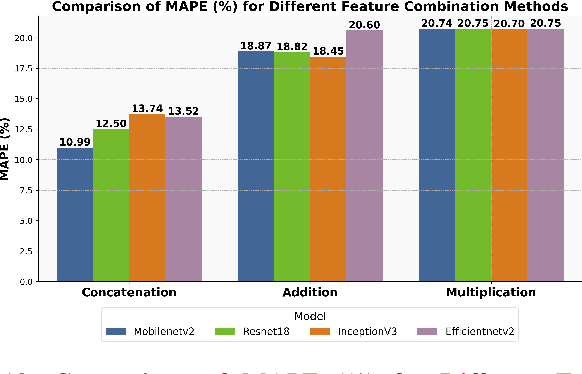
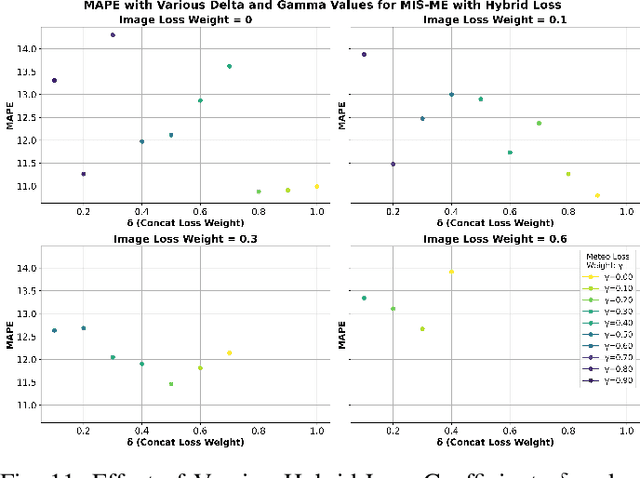
Soil moisture estimation is an important task to enable precision agriculture in creating optimal plans for irrigation, fertilization, and harvest. It is common to utilize statistical and machine learning models to estimate soil moisture from traditional data sources such as weather forecasts, soil properties, and crop properties. However, there is a growing interest in utilizing aerial and geospatial imagery to estimate soil moisture. Although these images capture high-resolution crop details, they are expensive to curate and challenging to interpret. Imagine, an AI-enhanced software tool that predicts soil moisture using visual cues captured by smartphones and statistical data given by weather forecasts. This work is a first step towards that goal of developing a multi-modal approach for soil moisture estimation. In particular, we curate a dataset consisting of real-world images taken from ground stations and their corresponding weather data. We also propose MIS-ME - Meteorological & Image based Soil Moisture Estimator, a multi-modal framework for soil moisture estimation. Our extensive analysis shows that MIS-ME achieves a MAPE of 10.79%, outperforming traditional unimodal approaches with a reduction of 2.6% in MAPE for meteorological data and 1.5% in MAPE for image data, highlighting the effectiveness of tailored multi-modal approaches.
Comprehensive Review on Semantic Information Retrieval and Ontology Engineering
Jul 25, 2023Situation awareness is a crucial cognitive skill that enables individuals to perceive, comprehend, and project the current state of their environment accurately. It involves being conscious of relevant information, understanding its meaning, and using that understanding to make well-informed decisions. Awareness systems often need to integrate new knowledge and adapt to changing environments. Ontology reasoning facilitates knowledge integration and evolution, allowing for seamless updates and expansions of the ontology. With the consideration of above, we are providing a quick review on semantic information retrieval and ontology engineering to understand the emerging challenges and future research. In the review we have found that the ontology reasoning addresses the limitations of traditional systems by providing a formal, flexible, and scalable framework for knowledge representation, reasoning, and inference.
Systematic design space exploration by learning the explored space using Machine Learning
Mar 14, 2023Current practice in parameter space exploration in euclidean space is dominated by randomized sampling or design of experiment methods. The biggest issue with these methods is not keeping track of what part of parameter space has been explored and what has not. In this context, we utilize the geometric learning of explored data space using modern machine learning methods to keep track of already explored regions and samples from the regions that are unexplored. For this purpose, we use a modified version of a robust random-cut forest along with other heuristic-based approaches. We demonstrate our method and its progression in two-dimensional Euclidean space but it can be extended to any dimension since the underlying method is generic.