 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic calibration of time of flight based non-line-of-sight reconstruction
May 21, 2021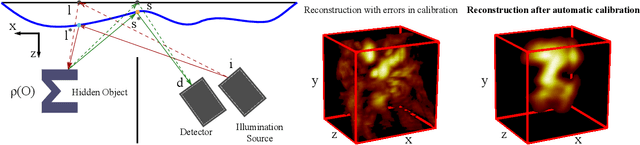
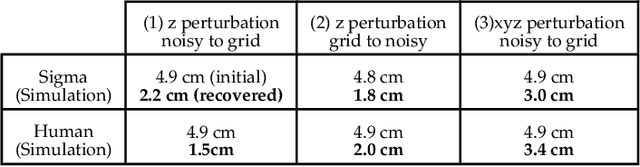


Time of flight based Non-line-of-sight (NLOS) imaging approaches require precise calibration of illumination and detector positions on the visible scene to produce reasonable results. If this calibration error is sufficiently high, reconstruction can fail entirely without any indication to the user. In this work, we highlight the necessity of building autocalibration into NLOS reconstruction in order to handle mis-calibration. We propose a forward model of NLOS measurements that is differentiable with respect to both, the hidden scene albedo, and virtual illumination and detector positions. With only a mean squared error loss and no regularization, our model enables joint reconstruction and recovery of calibration parameters by minimizing the measurement residual using gradient descent. We demonstrate our method is able to produce robust reconstructions using simulated and real data where the calibration error applied causes other state of the art algorithms to fail.