 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistration between Point Cloud Streams and Sequential Bounding Boxes via Gradient Descent
Sep 14, 2024In this paper, we propose an algorithm for registering sequential bounding boxes with point cloud streams. Unlike popular point cloud registration techniques, the alignment of the point cloud and the bounding box can rely on the properties of the bounding box, such as size, shape, and temporal information, which provides substantial support and performance gains. Motivated by this, we propose a new approach to tackle this problem. Specifically, we model the registration process through an overall objective function that includes the final goal and all constraints. We then optimize the function using gradient descent. Our experiments show that the proposed method performs remarkably well with a 40\% improvement in IoU and demonstrates more robust registration between point cloud streams and sequential bounding boxes
Analysis of the satellite navigational data in the Baseband signal processing of Galileo E5 AltBOC signal
Jan 17, 2021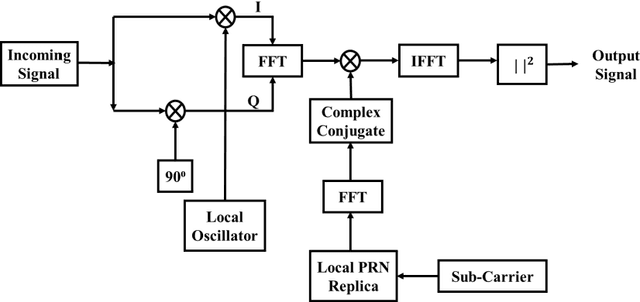
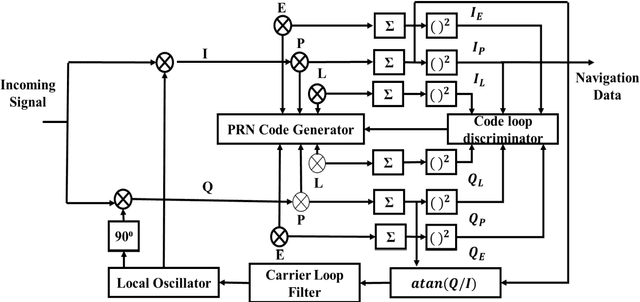

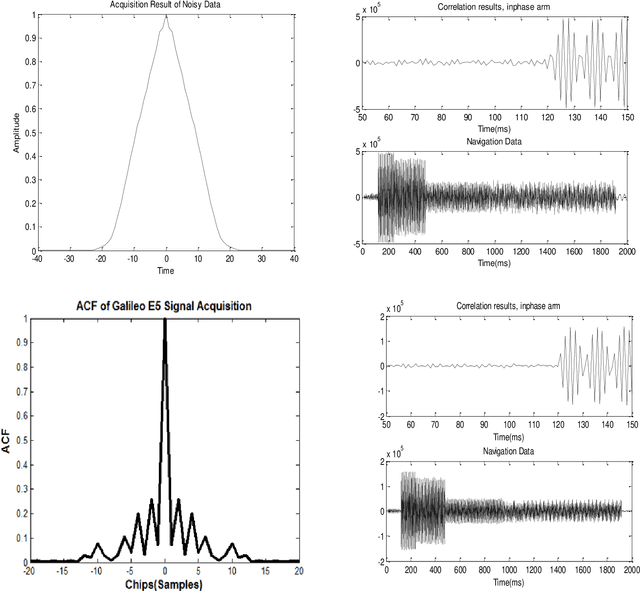
The advancement in the world of global satellite systems has enhanced the accuracy and reliability between various constellations. However, these enhancements have made numerous challenges for the receivers designer. For instance, comparing the acquisition and tracking of the Galileo signals turn into relatively complex processes after the utilization of Alternate Binary Offset Carrier AltBOC modulation scheme. This paper presents an efficient and unique method for comparing baseband signal processing of the complex receiver structure of the Galileo E5 AltBOC signal. More specifically, the data demodulation has attained after comparing the noisy satellite data sets with the clean data sets. Moreover, the paper presents the implementation of signal acquisition, code tracking, multipath noise characteristics, and carrier tracking for various datasets of the satellite after the eradication of noise. The results obtained in the paper are promising and provide the through treatment to the problem.
Real-time 3D object proposal generation and classification under limited processing resources
Mar 24, 2020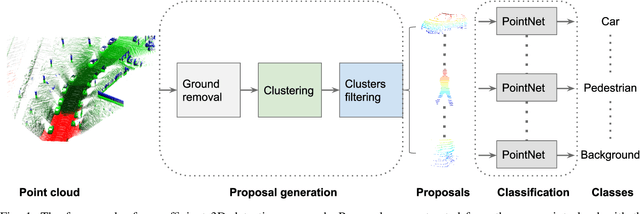
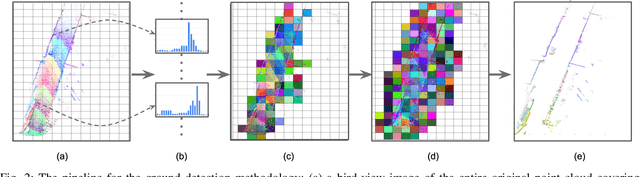
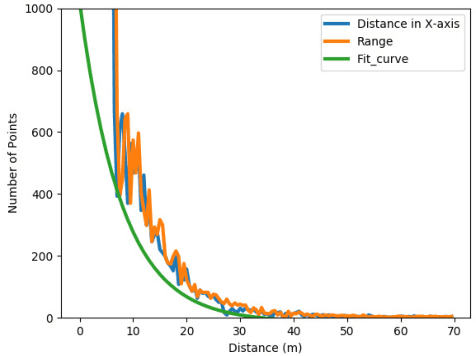
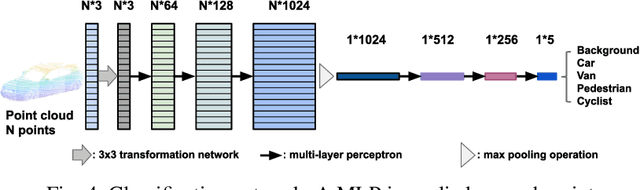
The task of detecting 3D objects is important to various robotic applications. The existing deep learning-based detection techniques have achieved impressive performance. However, these techniques are limited to run with a graphics processing unit (GPU) in a real-time environment. To achieve real-time 3D object detection with limited computational resources for robots, we propose an efficient detection method consisting of 3D proposal generation and classification. The proposal generation is mainly based on point segmentation, while the proposal classification is performed by a lightweight convolution neural network (CNN) model. To validate our method, KITTI datasets are utilized. The experimental results demonstrate the capability of proposed real-time 3D object detection method from the point cloud with a competitive performance of object recall and classification.